বৈদ্যুতিক মোটরের প্রয়োজনীয় শক্তি সূত্র (7.1) বা (7.3) দ্বারা নির্ধারিত হয়; সংশ্লিষ্ট আকার টেবিল অনুযায়ী নির্বাচিত হয়. 2.2। যেহেতু বিভিন্ন গতির মোটরগুলি গণনা করা ড্রাইভের জন্য উপযুক্ত, তাই বেশ কয়েকটি বিকল্প বিবেচনা করা উচিত এবং নির্দিষ্ট অপারেটিং অবস্থার সাথে সামঞ্জস্য রেখে সর্বোত্তমটি বেছে নেওয়া উচিত। একই সময়ে, এটি বিবেচনায় নেওয়া উচিত যে ঘূর্ণনের গতি বৃদ্ধির সাথে, ইঞ্জিনের ভর এবং এর মাত্রা হ্রাস পায়, ব্যয় হ্রাস পায়, তবে কাজের জীবনও হ্রাস পায়। অতএব, ড্রাইভের জন্য সাধারন ক্ষেত্রে, যদি কোন বিশেষ নির্দেশনা না থাকে, তাহলে 1500 বা 1000 rpm গতির মোটর পছন্দ করা হয় (যথাক্রমে, রেট করা মোডে গতি, 3% স্লিপ n nom ≈ 1450 বা 970 rpm বিবেচনা করে)।
n in = 60 v / πD (7.1)
তারপর ড্রাইভের মোট গিয়ার অনুপাত নির্ধারণ করুন
i = n nom / n in (7 .2)
এবং এটির একটি প্রাথমিক ভাঙ্গন তৈরি করুন:
i = i 1 i 2... i k (7.3)
যেখানে i 1,..., i k অন্তর্ভুক্ত প্রতিটি গিয়ারের গিয়ার অনুপাতের আংশিক মান সাধারণ স্কিমড্রাইভ নকশা প্রক্রিয়া চলাকালীন, এগুলি বেল্ট, চেইন, গিয়ার এবং ওয়ার্ম গিয়ারগুলির পরামিতিগুলির মান অনুসারে পরিমার্জিত হয়।
গিয়ার টাইপ নির্বাচন। মোটর শ্যাফ্টের সাথে মেশিনের শ্যাফ্টের সংযোগ কেবলমাত্র তুলনামূলকভাবে বিরল ক্ষেত্রেই সম্ভব, যখন এই শ্যাফ্টের ঘূর্ণন গতি একই হয়, উদাহরণস্বরূপ, সেন্ট্রিফিউগাল পাম্প, ফ্যান ইত্যাদির ড্রাইভে। যদি এই শর্তটি পূরণ না হয়, তাহলে মেশিন চালানোর জন্য একটি ওভারড্রাইভ বা ডাউনশিফ্ট প্রয়োজন।
ট্রান্সমিশনের সর্বোত্তম ধরনটি অনেকগুলি কারণ বিবেচনা করে নির্ধারণ করা হয়: অপারেটিং অবস্থা, অপারেশন চলাকালীন লোড পরিবর্তনের প্রকৃতি, একটি প্রদত্ত পরিষেবা জীবন, সুরক্ষা প্রয়োজনীয়তা, রক্ষণাবেক্ষণ এবং মেরামতের সহজতা, ড্রাইভের ব্যয় এবং এর ইনস্টলেশন।
নির্দিষ্ট অবস্থার উপর নির্ভর করে, একটি যান্ত্রিক ড্রাইভ ডিভাইস ডিজাইন করা ডিজাইনার গিয়ার ব্যবহার করার বিকল্পগুলি বিবেচনা করে বিভিন্ন ধরনের- গিয়ার, ওয়ার্ম, বেল্ট, চেইন, ঘর্ষণ এবং তাদের উপযুক্ত সংমিশ্রণ।
ড্রাইভ ডিভাইসের নকশা একটি কাইনেমেটিক গণনা দিয়ে শুরু করা উচিত। গণনার জন্য প্রয়োজনীয় প্রাথমিক ডেটা এই ধরনের সূচক হতে পারে: চালিত মেশিনের শ্যাফ্টে নামমাত্র টর্ক T, এর কৌণিক বেগ (বা ঘূর্ণন গতি u), একটি নির্দিষ্ট সময়ের জন্য লোড এবং ঘূর্ণন গতির পরিবর্তনের গ্রাফ। পরিবাহক ড্রাইভের জন্য, ড্রাইভ শ্যাফ্টের গতির পরিবর্তে, বেল্ট বা চেইনের গতি এবং তদনুসারে, ড্রাম বা স্প্রোকেটের ব্যাস প্রায়শই নির্দেশিত হয় এবং ড্রাইভ শ্যাফ্টের মুহুর্তের পরিবর্তে, পরিধি বল এফ। এই ডেটা থেকে, মুহূর্ত এবং গতির মান নির্ধারণ করা সহজ। আরও, মোটর শ্যাফ্টের ঘূর্ণনের গতি দ্বারা পূর্বনির্ধারিত (বিশেষত বেশ কয়েকটি সিঙ্ক্রোনাস ফ্রিকোয়েন্সি n s = 1000; 1500; 3000 rpm থেকে), গিয়ার অনুপাতের মানগুলি বিভিন্ন ড্রাইভ বিকল্পের জন্য গণনা করা হয়।
প্রাপ্ত মানগুলি বিশ্লেষণ করে, তারা ড্রাইভের বিন্যাসের জন্য বেশ কয়েকটি বিকল্পের রূপরেখা দেয়, সহ যান্ত্রিক সংক্রমণবিভিন্ন ধরনের. ড্রাইভের কাইনেম্যাটিক স্কিমগুলিকে প্রাথমিক হিসাবে বিবেচনা করা উচিত, পরবর্তী ডিজাইনের প্রক্রিয়ায় পরিমার্জন সাপেক্ষে।
মোটর নির্বাচন
একটি মোটর নির্বাচন করতে, অপারেটিং অবস্থার (লোড বক্ররেখা, তাপমাত্রা এবং আর্দ্রতা) জানা আবশ্যক। পরিবেশইত্যাদি), প্রয়োজনীয় শক্তি এবং খাদ গতি। এই তথ্য অনুসারে, ক্যাটালগ থেকে একটি বৈদ্যুতিক মোটর নির্বাচন করা হয় এবং এটি স্থির এবং ক্ষণস্থায়ী অবস্থার অধীনে এবং স্বল্প-মেয়াদী ওভারলোডের সময় গরম করার জন্য পরীক্ষা করা হয়।
কিছু ক্ষেত্রে, একটি বৈদ্যুতিক মোটর নির্বাচন সরলীকৃত হয়: 1) একটি দীর্ঘমেয়াদী ধ্রুবক বা সামান্য পরিবর্তনশীল লোড সহ, একটি গরম করার পরীক্ষার প্রয়োজন হয় না, যেহেতু নির্মাতা নির্দিষ্ট শর্ত এবং গ্যারান্টিগুলির জন্য এটি সম্পাদন করেছেন দীর্ঘ কাজনামমাত্র মোডে; 2) বিরতিহীন অপারেশন মোডের জন্য, বর্ধিত প্রারম্ভিক টর্ক সহ একটি ইঞ্জিন নির্বাচন করা হয়, সময়কে বিবেচনা করে (PV,%); 3) যে মেশিনটির জন্য ড্রাইভটি ডিজাইন করা হয়েছে সেটি যদি প্রায়শই চালু এবং বন্ধ থাকে, স্টার্ট-আপ সময়ের মধ্যে একটি বর্ধিত স্থিতিশীল প্রতিরোধ এবং একটি উল্লেখযোগ্য গতিশীল মুহূর্ত থাকে, তবে নির্বাচিত বৈদ্যুতিক মোটরটি শুরুর টর্ক টি স্টার্ট দ্বারা পরীক্ষা করা উচিত।
বৈদ্যুতিক মোটর লোড করার প্রথম ক্ষেত্রে প্রচুর পরিমাণে যান্ত্রিক ড্রাইভ রয়েছে - ফ্যান, পাম্প, কম্প্রেসার, কনভেয়র, কনভেয়র ইত্যাদি। লোড করার দ্বিতীয় ক্ষেত্রে উইঞ্চ, ক্রেন, হোস্ট ইত্যাদির ড্রাইভের জন্য সাধারণ।
মেশিনের অংশগুলির কোর্সে পরিচালিত প্রকল্পগুলিতে, প্রথম গ্রুপে অন্তর্ভুক্ত মেশিনগুলির জন্য ড্রাইভগুলি মূলত বিকাশ করা হয়। অতএব, ক্যাটালগ থেকে নির্বাচিত বৈদ্যুতিক মোটর গরম করার জন্য পরীক্ষা করার প্রয়োজন নেই। প্রয়োজনীয় মোটর শক্তি P (W) গণনাকৃত রেট লোড দ্বারা নির্ধারিত হয় [উদাহরণস্বরূপ, পরিবাহক এবং পরিবাহকের জন্য, ট্র্যাকটিভ ফোর্স (H) এবং বেল্টের গতি v (m/s)] দ্বারা। তারপর কাঙ্খিত শক্তি
P = Fv / η (8.1)
যেখানে η হল পুরো ড্রাইভের পারফরম্যান্সের সহগ (COP), ড্রাইভে অন্তর্ভুক্ত গিয়ারগুলির আংশিক দক্ষতার গুণফলের সমান;
η = η 1 η 2 η k (8.2)
ট্রান্সমিশন দক্ষতার গড় মান সারণীতে দেওয়া হয়েছে। 8.1 (বেয়ারিংয়ের ঘর্ষণ ক্ষতি বিবেচনা করে); এটি গিয়ার অনুপাতের গড় মানগুলিও নির্দেশ করে, যা কোর্স প্রকল্পগুলি সম্পাদন করার সময় নির্দেশক হিসাবে নেওয়া যেতে পারে।
যদি ড্রাইভের নকশার জন্য প্রাথমিক ডেটা ড্রাইভ শ্যাফ্টের টর্ক T (N * m) এর মান এবং এই শ্যাফ্টের কৌণিক বেগ ω (rad/s) নির্দেশ করে, তাহলে বৈদ্যুতিক মোটরের প্রয়োজনীয় শক্তি , ডব্লিউ
P = T ω / η (8.3)
পাওয়া ইঞ্জিন শক্তি অনুযায়ী, এর ধরন নির্ধারণ করা হয়, যা নির্দিষ্ট অপারেটিং অবস্থার জন্য সবচেয়ে উপযুক্ত।
টেবিল 8.1
দক্ষতা এবং গিয়ার অনুপাতের মান
শিল্প জাতীয় অর্থনীতির সমস্ত শাখার জন্য বিপুল সংখ্যক বৈদ্যুতিক মোটর উত্পাদন করে। কারেন্টের ধরন অনুসারে এগুলিকে নিম্নলিখিত প্রকারে ভাগ করা হয়েছে।
1. ডিসি মোটর; তারা মসৃণ নিয়ন্ত্রণের অনুমতি দেয় কৌণিক বেগখাদ, মসৃণ শুরু প্রদান, ব্রেকিং এবং বিপরীত; মূলত বৈদ্যুতিক যানবাহন, ক্রেন, উত্তোলন ইনস্টলেশন ইত্যাদির জন্য উদ্দিষ্ট।
2. একক ফেজ কিন্তু সিঙ্ক্রোনাস মোটরস্বল্প শক্তি, পরিবারের মেকানিজমের ড্রাইভে ব্যবহৃত হয়।
3. তিন-ফেজ সিঙ্ক্রোনাস মোটর, যার গতি লোডের উপর নির্ভর করে না; উচ্চ যান্ত্রিক নির্ভরযোগ্যতা দ্বারা চিহ্নিত, প্রধান ভোল্টেজ ওঠানামা কম সংবেদনশীলতা; তারা প্রধানত উচ্চ শক্তি ইনস্টলেশন ব্যবহার করা হয়.
4. তিন-ফেজ অ্যাসিঙ্ক্রোনাস মোটর, অর্থনীতির বিভিন্ন ক্ষেত্রে সবচেয়ে সাধারণ; অন্যান্য ধরনের ইঞ্জিনের তুলনায় তাদের সুবিধা: ডিজাইনের সরলতা, কম খরচ, উচ্চতর অপারেশনাল নির্ভরযোগ্যতা। কোর্স প্রকল্পগুলি সম্পূর্ণ করার সময়, এই মোটরগুলিকে ড্রাইভের জন্য বেছে নেওয়া উচিত।
নামমাত্র মোডে, গড় মান হল s ≈ 3 ÷ 5%। ভিতরেইঞ্জিন স্টার্ট-আপ পিরিয়ড, এর শ্যাফটের মুহুর্তটি T স্টার্ট থেকে T ম্যাক্সে পরিবর্তিত হয়, ঘূর্ণন গতি 0 থেকে n kr পর্যন্ত বৃদ্ধি পায়। বিন্দু T max n kr গুরুত্বপূর্ণ, এই মোডে কাজ করা অগ্রহণযোগ্য, কারণ ইঞ্জিন দ্রুত গরম হয়। যখন লোড T max থেকে T nom-এ কমে যায়, অর্থাৎ, নামমাত্র স্থির অবস্থায় পরিবর্তনের সময়, ঘূর্ণন গতি n nom-এ বৃদ্ধি পায়। লোডের আরও হ্রাসের সাথে, ঘূর্ণন গতি বৃদ্ধি পায় এবং T=0 এ এটি n s এর মান পর্যন্ত পৌঁছায়, যখন স্লিপ x= 0 হয়।
ইঞ্জিনটি s = 1 (বা 100%) এ শুরু হয়, যখন n = 0। বিন্দু S cr, T সর্বোচ্চ ক্রিটিক্যাল, ইঞ্জিনকে সামান্য বিলম্ব না করেই এটি পাস করতে হবে। সর্বাধিক এবং প্রারম্ভিক টর্কের মধ্যে বিভাগটি প্রায় রেক্টিলিনিয়ার: টর্কটি স্লিপের সমানুপাতিক। s রেট এ, মোটর রেটযুক্ত টর্ক বিকাশ করে এবং এই মোডে দীর্ঘ সময়ের জন্য পরিচালিত হতে পারে। S= 0 এ, মুহুর্তে Tও শূন্যের সমান, এবং গতি n s (rpm) পর্যন্ত বৃদ্ধি পায়, সূত্র দ্বারা নির্ধারিত:
যেখানে f হল কারেন্টের ফ্রিকোয়েন্সি, 1 সেকেন্ডে 50 পিরিয়ডের সমান; p হল জোড়া খুঁটির সংখ্যা। একটি নিয়ম হিসাবে, যান্ত্রিক ড্রাইভের জন্য মোটরগুলি 1 থেকে 4 (টেবিল 8.2) পর্যন্ত বেশ কয়েকটি মেরু জোড়া দিয়ে নির্বাচন করা হয়।
টেবিল 8.2
মেরু জোড়া সংখ্যা নির্ধারণ
এগুলি nnom-এর আনুমানিক মান এবং ডিজাইন করা ড্রাইভগুলির গিয়ার অনুপাত নির্ধারণ করার সময় বিবেচনায় নেওয়া উচিত।
ক্রমাগত অপারেশনের জন্য সাধারণ উদ্দেশ্যে একটি একক সিরিজ 4A এর তিন-ফেজ অ্যাসিঙ্ক্রোনাস কাঠবিড়ালি-খাঁচা মোটর দুটি সংস্করণে তৈরি করা হয়েছে: 15 - 400 কিলোওয়াট শক্তি সহ সুরক্ষিত মোটর এবং 0.06-315 কিলোওয়াট শক্তি সহ বন্ধ প্রস্ফুটিত মোটর। এই মোটরগুলি সুরক্ষিত মোটরগুলির তুলনায় আরও নির্ভরযোগ্য এবং ব্যবহার করা সহজ, তাই সাধারণ উদ্দেশ্য ড্রাইভের জন্য এগুলি বেছে নেওয়ার পরামর্শ দেওয়া হয়।
উপসংহার
উপকরণের উপর ভিত্তি করে মেয়াদী কাগজনিম্নলিখিত সিদ্ধান্তে টানা যেতে পারে:
1. মোট একটি ভাঙ্গন আউট বাহিত গিয়ার অনুপাতধাপে ধাপে
2. গিয়ারবক্সের প্রধান পরামিতিগুলির পছন্দকে ন্যায়সঙ্গত করা হয়েছে
3. গিয়ারের জন্য ইস্পাত গ্রেড পছন্দ ন্যায্যতা
4. আমরা অনুমোদনযোগ্য চাপ নির্ধারণ করেছি
5. প্রধান পরামিতি নির্ধারণ নলাকার গিয়ার
6. স্পার গিয়ার বর্ণনা করা হয়েছে। সংক্ষিপ্ত তথ্যজ্যামিতি এবং গতিবিদ্যায়
7. ড্রাইভের গিয়ার অনুপাত বর্ণনা করা হয়েছে
8. বৈদ্যুতিক মোটর পছন্দ ন্যায়সঙ্গত
গ্রন্থপঞ্জি
1. Babkin I.A. একটি এন্টারপ্রাইজের কৌশল নির্ধারণের একটি ফ্যাক্টর হিসাবে প্রতিযোগিতা // রাশিয়ার অর্থনীতি এবং প্রতিযোগিতামূলকতা: আন্তঃবিশ্ববিদ্যালয় সংগ্রহ বৈজ্ঞানিক কাগজপত্র. সমস্যা. নং 6. - সেন্ট পিটার্সবার্গ: পলিটেকনিক পাবলিশিং হাউস। আন-টা, 2004।
2. বাকানভ এম.আই. Sheremet A.D. তত্ত্ব অর্থনৈতিক বিশ্লেষণ. - এন.: পাঠ্যপুস্তক অর্থ ও পরিসংখ্যান, 1997।
3. বাইজেলম্যান আর.ডি. এবং অন্যান্য। রোলিং বিয়ারিং। - এম।: ম্যাশিনোস্ট্রোনি, 1975।
4. Birger I.A., Iosilevich G.B., থ্রেডেড সংযোগ। - M.: "ইঞ্জিনিয়ারিং" 1973.-256 পি।
5. Belyakov V.M., Zharkov M.S., Fedorov V.V., Yankovsky V.V. গিয়ারসরোলিং স্টক: টিউটোরিয়ালশিক্ষার্থীদের জন্য. কুইবিশেভ।: কেআইআইটি, 1990।
6. বোগদানভ এ.আই. এন্টারপ্রাইজ (অ্যাসোসিয়েশন) এ বৈজ্ঞানিক ও প্রযুক্তিগত অগ্রগতির কৌশলগত ব্যবস্থাপনা। - এম.: VAF, 1991।
7. খাদ এবং অক্ষ। নকশা এবং গণনা / এড. সোরেনসেন। এম.: ম্যাশিনোস্ট্রোনি, 1980।
8. গুজেনকভ পি.জি. মেকানিজম এবং মেশিন মেশিন যন্ত্রাংশ তত্ত্ব. নির্দেশিকাএবং জন্য অ্যাসাইনমেন্ট পরীক্ষার কাগজপত্র. "হায়ার স্কুল", 1966.- 93 পি।
9. উদাহরণ এবং কাজগুলিতে মেশিনের যন্ত্রাংশ: বিশ্ববিদ্যালয় / এডের জন্য পাঠ্যপুস্তক। নিচিপোরচিকা এসএন - মিনস্ক: উচ্চ বিদ্যালয়, 1981।
10. মেশিন যন্ত্রাংশ: হ্যান্ডবুক / এড. Acherkana.N.S. 3 খণ্ডে - এম.: ম্যাশিনোস্ট্রোয়েনি, 1968-1969।
11. মেশিন পার্টস: স্ট্রাকচারের অ্যাটলাস / এড। রেশেতোভা ডি.এন. - এম।: ম্যাশিনোস্ট্রোনি, 1988।
12. মেশিনের গতিশীলতা এবং মেশিনের নিয়ন্ত্রণ: হ্যান্ডবুক / ক্রেইনিন জিভি - এম.: ম্যাশিনোস্ট্রোয়েনি, 1988-এর সম্পাদনার অধীনে।
13. A. M. Ignatovich এবং A. N. Markov, মেশিনের যন্ত্রাংশ। পদ্ধতিগত নির্দেশাবলী এবং নিয়ন্ত্রণ কাজ। - এম।: "হায়ার স্কুল", 1975.-95 পি।
14. ইভানভ এম.এন. মেশিনের যন্ত্রাংশ - এম.: "হায়ার স্কুল", 1991.-383 পি।
15. তথ্য বিপ্লব: বিজ্ঞান, অর্থনীতি, প্রযুক্তি - এম.: INION, 1993. - 202 পি।
16. Itskovich G.M. চেরনাভস্কি এস.এ. এবং অন্যান্য। মেশিনের যন্ত্রাংশের হারে সমস্যা এবং গণনার উদাহরণ সংগ্রহ। - এম. "মাশিনোস্ট্রোয়েনি", 1975। 286 পি।
17. Klyachkin N.L. গ্রুপ থ্রেডেড সংযোগের গণনা।
18. Lyubushin M.P., Leshcheva V.B., Dyakova V.G. এন্টারপ্রাইজের আর্থিক এবং অর্থনৈতিক কার্যকলাপের বিশ্লেষণ। বিশ্ববিদ্যালয়ের জন্য পাঠ্যপুস্তক। – এম.: ইউনিটি-ডানা, 1999।
19. ব্যবহারিক গাইড. - এম।: ফিনপ্রেস, 1998। - 272 পি।
20. "ইঞ্জিনিয়ারিং", 1972.- 386 পি।
21. মাকসিমোভা এন.এস. আন্তঃবাজেটারি সম্পর্কের সংস্কারের বিষয়ে রাশিয়ান ফেডারেশন// অর্থ, 1998, নং 6।
22. মাকসিমকিনা E.A., Loskutova E.E., Dorofeeva V.V. বাজারের পরিবেশে ফার্মাসিউটিক্যাল প্রতিষ্ঠানের প্রতিযোগিতামূলকতা। - এম.: এমটিএসএফইআর, 1999। - 256 পি।
23. Nikolaev G.A. এবং অন্যান্য। যান্ত্রিক প্রকৌশলে ঢালাই কাঠামোর নকশা। - এম।: "ইঞ্জিনিয়ারিং", 1975। - 212 পি।
24. S.N. Nichiporchik, M.I. Korzhentsevsky, V.F. Kalachev এবং অন্যরা। উদাহরণ এবং কাজের মধ্যে মেশিনের যন্ত্রাংশ। - 2য় সংস্করণ।
25. সেরেনসেন এস.ভি., কোগায়েভ ভি.পি., শ্নেইডরোভিচ আর.এম. ভারবহন ক্ষমতা এবং শক্তির জন্য মেশিনের অংশগুলির গণনা। - এম "ইঞ্জিনিয়ারিং"। 1983.- 343 পি।
26. তারাবাসভ N.D., Uchaev P.N. মেশিন-বিল্ডিং কাঠামোর অংশ এবং সমাবেশগুলির নকশা: একটি হ্যান্ডবুক। - এম.: ম্যাশিনোস্ট্রোনি, 1983।
27. ঘর্ষণ, পরিধান, তৈলাক্তকরণ: হ্যান্ডবুক / V.V. অ্যালিসিন এবং অন্যান্য - এম।: ম্যাশিনোস্ট্রোনি, 1980।
28. চেরনাভস্কি এস.এ. প্লেইন বিয়ারিং। - এম.: মাশগিজ, 1963।
29. Chernavsky S.A., Bokov K.N., Chernin I.M. এবং অন্যান্য। মেশিনের যন্ত্রাংশের কোর্স ডিজাইন: পাঠ্যপুস্তক।- এম.: ম্যাশিনোস্ট্রয়েনিয়ে, 1988। -416s।
30. চেরনাভস্কি এস.এ. মেশিন যন্ত্রাংশের কোর্স ডিজাইন: টেকনিক্যাল স্কুলের জন্য পাঠ্যপুস্তক।- এম.: ম্যাশিনোস্ট্রোয়েনি, 1980.-351 পি।
পরিশিষ্ট
সংযুক্তি 1
যান্ত্রিক বৈশিষ্ট্যইস্পাত
| ইস্পাত গ্রেড | ব্যাস D, মিমি | প্রস্থ এস, মিমি | এইচবি কোর | সারফেস HRC | σ বি | σ টি | তাপ চিকিত্সা |
| এমপিএ | |||||||
| যে কোন | যে কোন | 163-192 | - | স্বাভাবিককরণ | |||
| » | » | 179-207 | - | » | |||
| 235-262 | - | উন্নতি | |||||
| 269-302 | - | » | |||||
| 40X | 235-262 | - | » | ||||
| 40X | 269-302 | - | » | ||||
| 40X | 269-302 | 45-50 | আপগ্রেড + | ||||
| HDTV শক্ত করা | |||||||
| 35XM | 235-262 | - | উন্নতি | ||||
| 35XM | 269-302 | - | » | ||||
| 35XM | 269-302 | 48-53 | আপগ্রেড + | ||||
| HDTV শক্ত করা | |||||||
| 40HN | 235-262 | - | উন্নতি | ||||
| 40HN | 269-302 | - | » | ||||
| 40HN | 269-302 | 48-53 | আপগ্রেড + | ||||
| HDTV শক্ত করা | |||||||
| 20ХН2M | 300 - 400 | 56-63 | আপগ্রেড + | ||||
| সিমেন্টেশন + | |||||||
| শক্ত করা | |||||||
| 18HGT | 300-400 | 56-63 | একই | ||||
| 12ХНЗА | 300 - 400 | 56-63 | » | ||||
| 25HGM | 300 -400 | 56-63 | » | ||||
| 4QXH2MA | 269-302 | 50-56 | আপগ্রেড + | ||||
| নাইট্রাইডিং | |||||||
| 35L | যে কোন | যে কোন | 163-207 | - | স্বাভাবিককরণ | ||
| 45L | 207-235 | - | উন্নতি | ||||
| 40GL | 235-262 | - | » |
পরিশিষ্ট 2
গণনা ইস্পাত স্পার, হেলিকাল এবং প্রযোজ্য শেভরন গিয়ারসগিয়ারবক্স, স্পার ওপেন গিয়ার এবং র্যাক এবং পিনিয়ন স্পার গিয়ার, সাপেক্ষে নিম্নলিখিত শর্তাবলী:
ক) গিয়ারবক্সের জন্য:
1) shafts ঘূর্ণায়মান bearings দ্বারা সমর্থিত হয়;
2) কেসটি ময়লা এবং জলের অনুপ্রবেশ থেকে সুরক্ষিত এবং যথেষ্ট অনমনীয়তা রয়েছে;
3) দাঁত তেল দিয়ে লুব্রিকেট করা হয়;
4) পরিবেশ রাসায়নিকভাবে অ-আক্রমনাত্মক;
5) ক্ষেত্রে তেলের তাপমাত্রা 95 °С এর বেশি নয়;
খ) মসৃণতা এবং যোগাযোগের মান অনুযায়ী নির্ভুলতার ডিগ্রি 6-9 - GOST 1643 - 81 অনুযায়ী;
7) পরিধিগত গতি গিয়ার চাকা- 16 m/s পর্যন্ত;
8) দাঁতের কার্যকারী পৃষ্ঠের রুক্ষতা পরামিতি রা≤ 2.5 µm;
9) GOST 13755-81 অনুযায়ী প্রাথমিক কনট্যুর;
খ) জন্য খোলা গিয়ার:
1) দাঁত গ্রীস সঙ্গে lubricated হয়;
2) GOST 1643-81 অনুযায়ী যোগাযোগের মান 9-10 অনুযায়ী নির্ভুলতার ডিগ্রি;
3) স্পার গিয়ারস;
4) পরিধিগত গতি 2 m/s পর্যন্ত;
5) চাকার প্রস্থ - 10 টির বেশি মডিউল নয়। মৌলিক উপাধি:
কিন্তু- ইন্টারঅ্যাক্সেল দূরত্ব, মিমি;
খ- প্রস্থ গিয়ার চাকা; মিমি;
d-ব্যাস, মিমি;
চ- বল, এন;
i- গিয়ার অনুপাত;
প্রতি- গুণাঙ্ক;
কে ঘ- স্থায়িত্ব সহগ;
কে বি- সমতা সহগ;
কেভি -গতিশীল সহগ:
কে ক- লোড বিতরণ ফ্যাক্টর:
কে β - লোড ঘনত্ব ফ্যাক্টর;
এল- জীবনকাল;
l- দৈর্ঘ্য, মিমি;
এম -নমন মুহূর্ত, N m;
টি- ক্লান্তি বক্ররেখার সূচক;
টি- মডিউল, মিমি;
এন- ভোল্টেজ পরিবর্তন চক্রের সংখ্যা (সময়);
এন জি- ভোল্টেজ বেস;
পি -ঘূর্ণন গতি, মিনিট -1;
আর -শক্তি, W;
টি - টর্ক, এন মিমি;
t-সময়, এস;
এবং- এক জোড়া গিয়ার চাকার গিয়ার অনুপাত;
v- পরিধিগত গতি, m/s;
এক্স -মোড ফ্যাক্টর:
এক্স -স্থানচ্যুতি ফ্যাক্টর;
Y চ- দাঁতের আকারের সহগ;
Yβ - দাঁতের প্রবণতার সহগ;
জেড-দাঁতের সংখ্যা;
α - প্রবৃত্তি কোণ;
ইনপুট n nom এবং n আউটপুটে গতির পরিচিত মানের উপর ভিত্তি করে, আমরা সূত্র দ্বারা গিয়ারবক্সের মোট গিয়ার অনুপাত নির্ধারণ করি:
পূর্ববর্তী অনুচ্ছেদ n nom এবং n আউটে প্রাপ্ত মানগুলি প্রতিস্থাপন করে আমরা পাই:

ধাপ সংখ্যা নির্ধারণ
যেহেতু ধাপের সংখ্যা নির্ধারণের জন্য ভর কমানোর মানদণ্ডটি TOR-তে নির্দিষ্ট করা হয়েছে, তাই আমাদের কাছে সূত্র রয়েছে
 (3), যেখানে
(3), যেখানে
k- EMF পর্যায়ের আনুমানিক সংখ্যা;
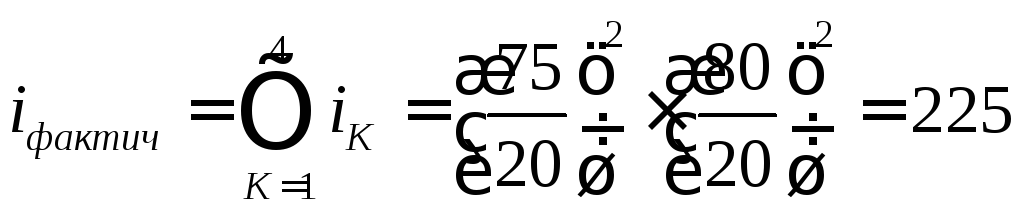
i 0 - মোট গিয়ার অনুপাত, i 0 =225;
থেকে 2 - সূত্র অনুযায়ী সমান-শক্তির বাঁকানো গিয়ারের জন্য গুণাঙ্ক নির্ধারিত হয়:
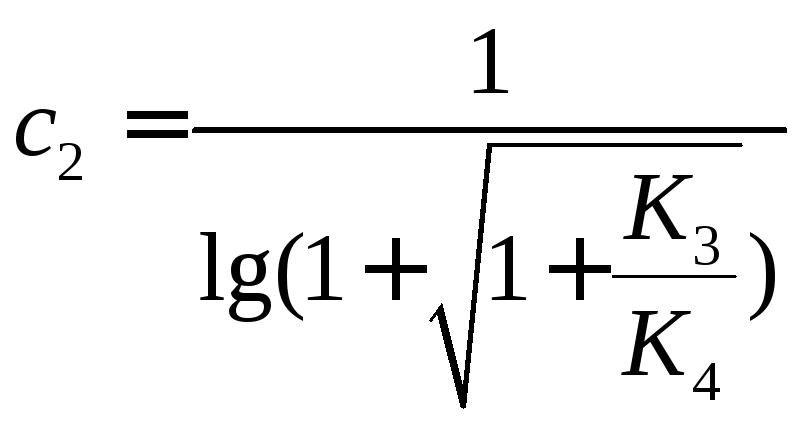 , কোথায়
, কোথায়
কে 3, কে 4 - সহগ যা ডিজাইনের উপর গিয়ার ভরের নির্ভরতা বিবেচনা করে। টেবিল থেকে নির্বাচিত। K 3 =0.5, K 4 =4।
(3) এর মানগুলি প্রতিস্থাপন করে আমরা পাই:
নিকটতম উচ্চতর পূর্ণসংখ্যা পর্যন্ত বৃত্তাকার, আমরা পাই যে গিয়ার পর্যায়গুলির সংখ্যা k=4।
ধাপে মোট গিয়ার অনুপাতের বন্টন
1 নং টেবিল
যেহেতু দাঁতের সংখ্যার পছন্দটি প্রস্তাবিত স্ট্যান্ডার্ড রেঞ্জ থেকে করা হয়, ফলে গিয়ারের অনুপাত গণনা করা থেকে কিছুটা আলাদা হতে পারে। গণনা করা থেকে প্রকৃত গিয়ার অনুপাতের ত্রুটি (Δi) 10% এর বেশি হওয়া উচিত নয়, যেখানে  .
.
প্রকৃত গিয়ার অনুপাত i আসলে সূত্র দ্বারা পাওয়া যায়:
 .
.
আমরা গিয়ার অনুপাতের ত্রুটি গণনা করি:
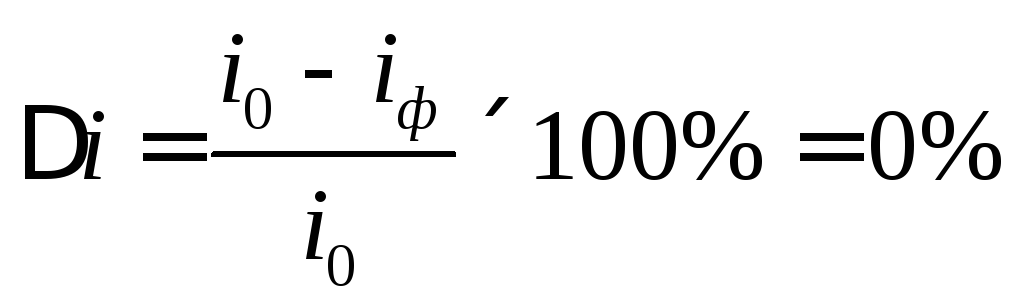
অতএব, চাকা এবং গিয়ারগুলির দাঁতের সংখ্যার পছন্দটি সঠিকভাবে করা হয়েছিল।
গিয়ারবক্সের কাইনেমেটিক ডায়াগ্রাম চিত্র 1 এ দেখানো হয়েছে।
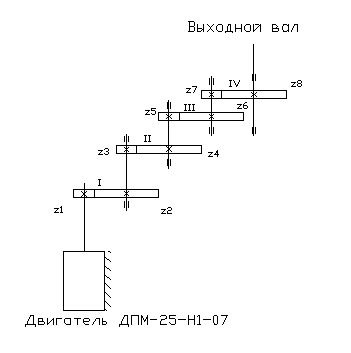
ডুমুর। 1. EMF এর কাইনেমেটিক স্কিম
স্থির লোড দ্বারা নির্বাচিত মোটরের গণনা জোর করে emp যাচাইকরণ
যেহেতু এই ডিজাইনের পর্যায়ে ইএমএফের কাইনেম্যাটিক স্কিমটি পরিচিত, তারপরে মুহুর্তের হ্রাসের অনুপাত থেকে:
 (4), কোথায়
(4), কোথায়
এম i ,এম i- i-th এবং j-th shafts উপর লোড মুহূর্ত;
i ij- i-th এবং j-th শ্যাফ্টের গিয়ার অনুপাত;
η ij- সংক্রমণ দক্ষতা, η ij =0.98;
η subsh- বিয়ারিংয়ের দক্ষতা যেখানে ড্রাইভ শ্যাফ্ট ইনস্টল করা আছে, η subsh =0.99.
যেহেতু ইঞ্জিন শুরু করার মুহুর্তে ইঞ্জিন এবং লোডের জড়তা বিবেচনা করা প্রয়োজন, তাই ইঞ্জিনটি লোডের পছন্দসই কৌণিক ত্বরণ সরবরাহ করে। নিম্নলিখিত মুহূর্তটি আউটপুট শ্যাফ্টে কাজ করে, গতিশীল উপাদানটিকে বিবেচনা করে:
এম Σ = এম n + জে n n =0.35+0.2*10=2.35 (N*m)
মোটরের পছন্দের সঠিকতা পরীক্ষা করার জন্য, আউটপুট থেকে শুরু করে প্রতিটি শ্যাফ্টের সূত্র (4) অনুসারে মোটর শ্যাফ্টের আউটপুট শ্যাফ্টে টর্ক আনতে হবে এবং স্টার্টিং টর্কের তুলনা করতে হবে। কম টর্ক সহ মোটর।
আমরা মোটর শ্যাফ্টে ক্রমানুসারে গণনা করি:

আসুন ইঞ্জিনের পছন্দের সঠিকতার একটি প্রাথমিক পরীক্ষা করি:
পাসপোর্টের তথ্য অনুযায়ী এম শুরু\u003d 11.8 10 -3 N m, অর্থাৎ, 11.8 ≥ 11.8 - true => ইঞ্জিনটি সঠিকভাবে নির্বাচন করা হয়েছে। অর্থাৎ, নির্বাচিত ইঞ্জিনটি শুরুতে লোডের প্রয়োজনীয় কৌণিক ত্বরণ প্রদান করতে সক্ষম হবে।
প্রবৃত্তি মডুলাস নির্ধারণ
বাগদান মডুলাস শক্তির জন্য দাঁতের গণনা থেকে নির্ধারিত হয় (বাঁকানো এবং যোগাযোগ)। যেহেতু EMF ডিজাইন অনুমান করে খোলা টাইপগিয়ার, তারপর নমন জন্য দাঁত গণনা নকশা হয়.
দাঁতের পরিচিত জ্যামিতি এবং প্রদত্ত লোডগুলির গণনা পরীক্ষা করার সময়, কার্যকর যোগাযোগের চাপ σ n নির্ধারণ করা হয় এবং অবস্থা σ n ≤ [σ n ] পরীক্ষা করা হয়।
নমন শক্তি গণনা সবচেয়ে লোড করা গিয়ার পর্যায়ে বাহিত হয়, যেমন আমাদের ক্ষেত্রে Z 8 -Z 7 মঞ্চের জন্য। এই ক্ষেত্রে, মডুলাসটি অনুপাত দ্বারা দাঁতযুক্ত প্রাথমিক জোড়ার কম টেকসই চাকা দ্বারা নির্ধারিত হয়:
 (5), কোথায়
(5), কোথায়
m - স্পার গিয়ারের মডিউল;
K হল গণনাকৃত লোড ফ্যাক্টর, K=1.1...1.5 ( অনুসারে নির্বাচিত), K=1.3 মানটি বেছে নিন;
M হল গণনাকৃত চাকা [N m] এর উপর কাজ করে এমন টর্ক,
Y F - দাঁত আকৃতির সহগ, টেবিল থেকে নির্বাচিত, আমাদের ক্ষেত্রে Y F = 3.73;
ψ ইন - গিয়ার রিমের আকৃতির ফ্যাক্টর, সূক্ষ্ম দানাদার গিয়ারের জন্য ψ \u003d 3 ... 16 (অনুসারে), আমরা \u003d 6-এ ψ বেছে নিই;
 - নমনের জন্য দাঁত গণনা করার সময় অনুমোদিত চাপ [MPa];
- নমনের জন্য দাঁত গণনা করার সময় অনুমোদিত চাপ [MPa];
Z হল গণনা করা চাকার দাঁতের সংখ্যা।
যদি, সূত্র (5) দ্বারা মডিউল m নির্ধারণ করার সময়, এটি মান দেয়< 0.3 мм, то, исходя из конструктивных соображений, модуль принимают равным 0.3 мм.
গিয়ারে, আমরা উপাদানটিকে আরও শক্তিশালী করি। আমরা প্রস্তাবিত জোড়া থেকে উপাদান নির্বাচন করুন:
গিয়ারস: ইস্পাত 20X
তাপ চিকিত্সা: বাল্ক শক্ত করা (জোরালো হওয়া উচিত)
\u003d 7.85 গ্রাম / সেমি 3
\u003d 850 MPa - প্রসার্য শক্তি
t \u003d 630 MPa - ফলন শক্তি
চাকা: ইস্পাত 50
তাপ চিকিত্সা: পৃষ্ঠ শক্ত করা
\u003d 7.85 গ্রাম / সেমি 3
\u003d 800 MPa - প্রসার্য শক্তি
t \u003d 590 MPa - ফলন শক্তি
[σF]=  , কোথায়
, কোথায়
σ FR - নমন সহনশীলতা সীমা;
কে এফসি - চাকা লোডিং চক্রকে বিবেচনায় নেওয়া সহগ;
কে FL - স্থায়িত্ব ফ্যাক্টর;
δ F - নিরাপত্তা ফ্যাক্টর (যেহেতু অপারেটিং অবস্থা স্বল্পমেয়াদী, তারপর δ F = 2.2);
K FC =1, অ-উল্টানো যায় এমন ট্রান্সমিশনের জন্য।
কেএফএল =  , কোথায়
, কোথায়
N N হল লোডিং চক্রের সংখ্যা
n– গিয়ার চাকার ঘূর্ণন ফ্রিকোয়েন্সি, n=20 rpm,
c হল গণনাকৃত চাকার সংখ্যা, с=1,
L হল ট্রান্সমিশনের পরিষেবা জীবন, L=100 ঘন্টা।
N H \u003d 60 20 1 100 \u003d 120,000 বিপ্লব
K FL = (4000000/120000)^1/6 = 1.794
উভয় গিয়ার এবং চাকাতেই σ FR = 550 MPa আছে।
[σF]=  = 550 1 1.794/2.2 = 448.5 MPa
= 550 1 1.794/2.2 = 448.5 MPa
গিয়ারগুলির জন্য, Y f এর মানগুলি চাকার চেয়ে বেশি, এবং ফলস্বরূপ, Y f / [σ f ] এর অনুপাত বেশি, তাই গণনাটি গিয়ারের উপর ভিত্তি করে।
সূত্রে তথ্য প্রতিস্থাপন (5) আমরা প্রাপ্ত
নকশা বিবেচনার উপর ভিত্তি করে, আমরা 0.3 মিমি সমান সমস্ত গিয়ারগুলিতে এনগেজমেন্ট মডিউলগুলি বরাদ্দ করি৷
গিয়ার এবং চাকার জন্য অনুমোদিত চাপ নির্ধারণ
[σ n ] \u003d σ HR Z R Z V K HL 1.2 / δ H 12, যেখানে
σ HR হল দাঁতের পৃষ্ঠের যোগাযোগ সহনশীলতার সীমা;
σ HR গিয়ারস = 18 HRC+150 = 18 52+150 = 1086 MPa;
σ HR চাকা = 17 HRC+200 = 17 48+200 = 1016 MPa;
Z R - মিলন পৃষ্ঠের রুক্ষতা সহগ, Z R =1;
Z V - চাকার পরিধিগত গতি বিবেচনা করে সহগ, Z V =1;
δ H 12 - নিরাপত্তা ফ্যাক্টর, δ H 12 \u003d 1/2;
কে এইচএল - জীবন ফ্যাক্টর
K HL =  , কোথায়
, কোথায়
N H = 120000 বিপ্লব
N HO = 1.5*10 8 HRC45...50 পর্যন্ত শক্ত করা গিয়ারের জন্য
K HL = = 
[σ n ] গিয়ারস = 1086 1 1 3.282/1.2 = 2970 MPa
[σ n] চাকা = 1016 1 1 3.282/1.2 = 2778 MPa
অতএব, অনুমোদিত যোগাযোগ চাপ
[σ n ] = 2778 MPa
অনুমোদনযোগ্য নমন চাপ
কখনও কখনও তথ্যের একটি বৃহৎ প্রবাহে (বিশেষত নতুন) কিছু গুরুত্বপূর্ণ তুচ্ছ জিনিস খুঁজে পাওয়া খুব কঠিন, "সত্যের দানা" বের করা। এই সংক্ষিপ্ত নিবন্ধে আমি গিয়ারের গিয়ার অনুপাত এবং সাধারণভাবে ড্রাইভ সম্পর্কে কথা বলব। এই বিষয়টি কভার করা বিষয়গুলির খুব কাছাকাছি...
ড্রাইভটি ইঞ্জিন এবং ইঞ্জিন শ্যাফ্ট এবং ওয়ার্কিং বডির (কাপলিং, গিয়ারবক্স, বিভিন্ন গিয়ার) এর মধ্যে অবস্থিত এবং কাজ করে এমন সমস্ত কিছু। "মোটর শ্যাফ্ট" কী তা স্পষ্ট, আমি মনে করি, প্রায় সবাই। "কর্মরত শরীরের খাদ" কি তা স্পষ্ট, সম্ভবত অনেকের কাছে নয়। ওয়ার্কিং বডির শ্যাফ্ট হল সেই শ্যাফ্ট যার উপর মেশিনের উপাদান স্থির করা হয়, যা প্রয়োজনীয় নির্দিষ্ট টর্ক এবং গতির সাথে পুরো ড্রাইভ দ্বারা চালিত হয়। এটি হতে পারে: একটি ট্রলি (কার) চাকা, একটি বেল্ট পরিবাহক ড্রাম, একটি চেইন পরিবাহক স্প্রোকেট, একটি উইঞ্চ ড্রাম, একটি পাম্প শ্যাফ্ট, একটি সংকোচকারী খাদ এবং আরও অনেক কিছু।
উমোটর শ্যাফ্টের গতির অনুপাত এনডিভিমেশিনের ওয়ার্কিং বডির শ্যাফটের ঘূর্ণনের ফ্রিকোয়েন্সি পর্যন্ত না.
U = ndv/nro
মোট ড্রাইভ অনুপাত উপ্রায়শই অনুশীলনে, গণনা থেকে এটি মোটামুটি বড় সংখ্যায় পরিণত হয় (দশেরও বেশি, এমনকি পঞ্চাশেরও বেশি), এবং শক্তি, শক্তি এবং সহ বিভিন্ন বিধিনিষেধের কারণে এটি একটি গিয়ারে সম্পাদন করা সবসময় সম্ভব হয় না। সামগ্রিক অতএব, ড্রাইভটি সিরিজে সংযুক্ত বেশ কয়েকটি গিয়ার নিয়ে গঠিত তাদের সর্বোত্তম সঙ্গে গিয়ার অনুপাত Ui. এই ক্ষেত্রে, মোট গিয়ার অনুপাত উসমস্ত গিয়ার অনুপাতের পণ্য হিসাবে পাওয়া যায় Uiড্রাইভে অন্তর্ভুক্ত।
U =U1 *U2 *U3 *…Ui *…Un
গিয়ার অনুপাত Uiট্রান্সমিশন ইনপুট শ্যাফ্টের ঘূর্ণন গতির অনুপাত nin iএই ট্রান্সমিশনের আউটপুট শ্যাফ্টের গতিতে নউটি.
Ui = nin/nout

নির্বাচন করার সময়, সীমার শুরুর কাছাকাছি মানগুলিকে অগ্রাধিকার দেওয়া বাঞ্ছনীয়, অর্থাৎ ন্যূনতম মানগুলি।
প্রস্তাবিত টেবিল শুধুমাত্র একটি সুপারিশ এবং একটি মতবাদ না! উদাহরণস্বরূপ, যদি আপনি বরাদ্দ করেন চেইন ড্রাইভ উ=1.5, তাহলে ভুল হবে না! অবশ্যই, সবকিছুর জন্য একটি যুক্তি থাকতে হবে। এবং, সম্ভবত, পুরো ড্রাইভের খরচ কমাতে, এটি আরও ভাল উ=1.5 অন্যান্য গিয়ারের গিয়ার অনুপাতের ভিতরে "লুকান", সেই অনুযায়ী তাদের বাড়ান।
ডিজাইন অপ্টিমাইজেশান সমস্যা গিয়ার হ্রাসকারীবিভিন্ন পণ্ডিতদের দ্বারা অনেক মনোযোগ দেওয়া হয়েছে। পিএফ ডুনায়েভ, জিএ স্নেসারেভ, ভিএন ভালো অবস্থাতৈলাক্তকরণ, তেল স্প্ল্যাশ হ্রাস, সমস্ত বিয়ারিংয়ের অভিন্ন এবং উচ্চ স্থায়িত্ব, ভাল শ্যাফ্ট অনমনীয়তা। প্রতিটি লেখক, গিয়ারের অনুপাতকে গিয়ার পর্যায়ে ভাঙ্গার জন্য তাদের নিজস্ব অ্যালগরিদম প্রস্তাব করে, এই বিতর্কিত সমস্যাটি সম্পূর্ণ এবং দ্ব্যর্থহীনভাবে সমাধান করেনি। এই সম্পর্কে খুব আকর্ষণীয় এবং বিস্তারিত নিবন্ধে লেখা আছে: http://www.prikladmeh.ru/lect19.htm।
সমাধান যোগ করুন এই ঘটনাএকটু বেশি অস্পষ্টতা... আমরা এক্সেলের আরেকটি টেবিলের দিকে তাকিয়ে আছি।
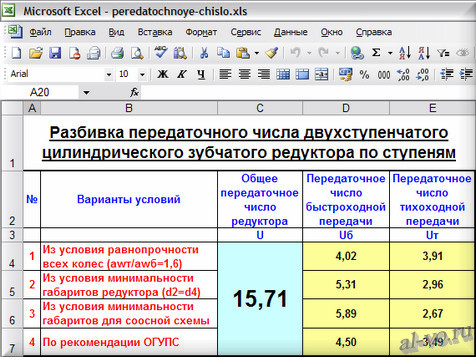
আমরা সম্মিলিত কক্ষ C4-7 এ গিয়ারবক্সের মোট গিয়ার অনুপাতের মান সেট করেছি উএবং কোষে গণনার ফলাফলগুলি পড়ুন D4 ... D7 - উখএবং কোষে E4…E7 - উটিবিভিন্ন অবস্থার চারটি রূপের জন্য সঞ্চালিত।
সারণীতে প্রদত্ত মানগুলি সূত্র দ্বারা গণনা করা হয়:
1. ঘরে D4 : =H4*$C$4^2+I4*$C$4+J4 =4,02 উখ =a *U ^2+b *U +c
E 4 কক্ষে : =$C$4/D4 =3.91 উটি = উ / উখ
H 4 কক্ষে: ক =-0,0016111374
সেল I 4 এ: খ =0,24831562
সেল J 4 এ: গ =0,51606736
2. ঘরে D5 : =H5*$C$4^2+I5*$C$4+J5 =5.31 উখ =a *U ^2+b *U +c
E 5 কক্ষে : =$C$4/D5 =2.96 উটি = উ / উখ
ঘরে H 5: ক =-0,0018801488
সেল I 5 এ: খ =0,26847174
সেল J 5 এ: গ =1,5527345
3. ঘরে D6 : =H6*$C$4^2+I6*$C$4+J6 =5.89 উখ =a *U ^2+b *U +c
E 6 ঘরে : =$C$4/D6 =2.67 উটি = উ / উখ
H 6 কোষে: ক =-0,0018801488
সেল I 6 এ: খ =0,26847174
সেল J6 এ: গ =1,5527345
4. ঘরে D 7 : =C4/E7 =4.50 উখ = উ / উটি
ঘরে E 7 : =0.88*C4^0.5 =3.49 উটি =0,88* উ ^0,5
উপসংহারে, আমি সুপারিশ করার সাহস করি: একক-পর্যায়ের গিয়ার ডিজাইন করবেন না হেলিকাল গিয়ারবক্সগিয়ার অনুপাত সহ উ>6…7, দুই-পর্যায় – সহ উ>35…40, তিন-পর্যায় - সহ উ>140…150.
এটি "কীভাবে ধাপে ধাপে ড্রাইভের গিয়ার অনুপাতকে সর্বোত্তমভাবে "ব্রেক" করার বিষয়গুলির একটি সংক্ষিপ্ত ডিগ্রেশন। এবং "কিভাবে একটি গিয়ার অনুপাত চয়ন করবেন?" সম্পন্ন
প্রিয় পাঠক, আমার ব্লগ নিবন্ধগুলির ঘোষণা পেতে সাবস্ক্রাইব করুন। বোতাম সহ উইন্ডোটি পৃষ্ঠার শীর্ষে রয়েছে। আপনি এটি পছন্দ না হলে, আপনি সবসময় আনসাবস্ক্রাইব করতে পারেন.