De krachten van interactie van de tanden worden meestal bepaald in de aangrijpingspool. De belaste belasting verdeeld over het contactgebied wordt vervangen door de resulterende F n loodrecht op het tandoppervlak. Het is handig om deze kracht weer te geven in de vorm van componenten F t, F r , Fa.
Wijkmacht F T = 2 10 3 T/d ;
Axiale kracht F A = F T tgβ
Op het aangedreven wiel valt de richting van de omtrekkracht F t samen met de draairichting, op het aangedreven wiel is deze er tegengesteld aan.
radiale kracht F R = F R tga = F T tga / cosβ
De vectoren van radiale krachten voor wielen met externe tandwielen zijn naar de as gericht en voor wielen met interne tandwielen - weg van de as tandwiel.
2. Berekening van rechte tandwielen voor contactsterkte.
De contactsterkte van de tanden is het belangrijkste criterium voor de meeste tandwielen.
In versnellingen zonder voorspanning a w = (d 2 ± d 1) / 2 = d 1 (u ± 1) / 2
Waardoor d 1 = 2 a w /(u ± 1) d 2 = 2a w u/(u ± 1),
waarbij u = d 2 /d 1 de overbrengingsverhouding is.
Beste contact spanning in de aanvalszone wordt bepaald door de Hertz-formule:
ν 1,2 – Pausson-coëfficiënten van materialen van contactlichamen;
E 1.2 - elasticiteitsmoduli van materialen;
ρ 1,2 zijn de kromtestralen van de contactvlakken;
b is de lengte van de contactlijn (de lengte van de cilinders)
De kracht F n wordt bepaald door de omtrekkracht, rekening houdend met de belastingsfactor. Volgens de resultaten van experimenten voor berekeningen, de totale lengte
b= l Σ rijdraden worden bepaald rekening houdend met de coëfficiënt van eindoverlapping: F n = K H ·Ft/cosα ; b = l Σ = 3b 2 /(4 - ε α).
Het contact van de tanden wordt beschouwd als het contact van twee cilinders met de kromtestralen van de tandprofielen in de tandwielpool:
We vervangen de verkregen waarden in de Hertz-formule:
Σ(1/ρ i) = 1/ρ 1 ± 1/ρ 2 = (ρ 2 ± ρ 1)/(ρ 2 ρ 1)
=

Aanduiden:
Z E =  - coëfficiënt rekening houdend met de elastische eigenschappen van de materialen van de bijpassende wielen; Z E \u003d 191,6 MPa 0,5 voor stalen wielen met E 1 \u003d E 2 \u003d 2,1 10 5 MPa en ν 1 \u003d ν 2 \u003d 0,3.
- coëfficiënt rekening houdend met de elastische eigenschappen van de materialen van de bijpassende wielen; Z E \u003d 191,6 MPa 0,5 voor stalen wielen met E 1 \u003d E 2 \u003d 2,1 10 5 MPa en ν 1 \u003d ν 2 \u003d 0,3.
Z H =  - coëfficiënt rekening houdend met de vorm van de pasvlakken van de tanden in de overbrengingspool; Z H = 2,5 bij α w = 20 o.
- coëfficiënt rekening houdend met de vorm van de pasvlakken van de tanden in de overbrengingspool; Z H = 2,5 bij α w = 20 o.
Zε =  - coëfficiënt rekening houdend met de totale lengte van de contactlijnen; Z ε = 0,9 voor rechte tandwielen met ε α = 1,6.
- coëfficiënt rekening houdend met de totale lengte van de contactlijnen; Z ε = 0,9 voor rechte tandwielen met ε α = 1,6.
In dit geval verkrijgen we de berekende afhankelijkheid in de vorm waarin de norm voorziet:  ;
;
Vervanging in de formule F t \u003d 2 10 3 T 1 /d 1; b 2 \u003d ψ ba a w; d 1 = 2a w /(u ± 1) , zullen we achtereenvolgens verkrijgen
Beslissen voor a w krijgen we a w =  ;
;
Ter aanduiding van K a = 
De formule voor de ontwerpberekening van cilindrische tandwielen is: a w = K a 
Volgens de norm:
voor rechte tandwielen Ka = 450 MPa 1/3;
voor spiraal- en visgraat tandwielen Ka \u003d 410 MPa 1/3.
Over het algemeen is de hartafstand van de spiraalvormige cilindrische tandwiel trein ongeveer 20% minder dan de hartafstand van het rechte tandwiel.
Bij het berekenen van cilindrische tandwielen wordt de waarde van de breedtecoëfficiënt van de tandwielrand van het wiel ψ VA = b 2 /a w ingesteld. Afhankelijk van de locatie van het tandwiel ten opzichte van de steunen, accepteren ze: ψ va = 0,2 ... 0,5.
Formule voor verificatieberekening:
Coëfficiënte waarden Z σ voor cilindrische stalen tandwielen:
spoor Z σ = 9600 MPa 1/2;
spiraalvormig en chevron Z σ = 8400 MPa 1/2
In de ontwerpberekening wordt de waarde van de ontwerpbelastingsfactor K N = 1,3 bij benadering vastgesteld. Tijdens de verificatieberekening wordt de verfijnde waarde bepaald door de bekende afmetingen en mate van transmissienauwkeurigheid.
Bij het uitvoeren van een verificatieberekening is het wenselijk om gelijkheid te bereiken σ H = [σ] H, want op σ H > [σ] H- het is mogelijk om de transmissiebron te onderschatten, en wanneer σ H < [σ] H overschatting van zijn massa. De eenvoudigste manier om σ N = [σ] N te bereiken, is door de breedte van het ringwiel b 2 te wijzigen. De contactsterkte van de tandwieltanden is afhankelijk van het materiaal en de afmetingen van de transmissie en is niet afhankelijk van de module en het aantal tanden afzonderlijk. Afhankelijk van de contactsterktevoorwaarden voor een gegeven a w, kunnen de modulus en het aantal tanden verschillende waarden hebben, maar onder de volgende voorwaarden: 0,5 m(Z 1 + Z 2) = a w en u = Z 2 /Z 1.
3. Berekening van de tanden van cilindrische tandwielen voor buigsterkte.
Het tweede van de twee belangrijkste criteria voor de prestaties van tandwielen is de buigsterkte van de tanden. Bij het afleiden van de berekende afhankelijkheid worden de volgende aannames gedaan:
Er is één paar tanden in aangrijping.
De tand wordt beschouwd als een vrijdragende balk die wordt belast met een geconcentreerde kracht F n die aan de bovenkant op de tand wordt uitgeoefend
Kracht F n werkt onder een hoek (90 - α /) met de symmetrieas van de tand; de hoek α / is iets groter dan de aangrijpingshoek α w . Om de spanningstoestand van de tand te identificeren, wordt de kracht Fn overgebracht langs de aangrijpingslijn N 1 N 2 totdat deze de as van de tand snijdt in t. C. en wordt ontleed in componenten die langs de as van de tand zijn gericht en loodrecht erop (afb. 2).
Onder invloed van de component die langs de as is gericht, werken compressiespanningen σ com = F n sinα / / bS aan de basis van de tand, waarvan het diagram wordt getoond in Fig. 3 (b-tandlengte). Punten A en B bepalen de positie van het gevaarlijke deel van de tand tijdens het buigen. De tand in deze sectie wordt belast met een buigmoment M = F n h р cosα / , waardoor spanningen σ ontstaan en: links van de as - spanning, rechts - compressie. De totale spanningen σ Fnom aan de kant van de uitgerekte vezels (t.A) hebben lagere waarden dan aan de kant van de samengedrukte vezels (t.B). Trekspanningen zijn echter gevaarlijker. Spanningen die zonder concentrators worden gevoed, worden nominaal genoemd.
Laten we de nominale spanningen van buiging - compressie in t.A bepalen:
waarbij W x \u003d bS 2 /6 het axiale weerstandsmoment is van de gevaarlijke sectie AB.
Als we de kracht F n uitdrukken via de omtrekkracht F t, rekening houdend met de belastingsfactor K F , krijgen we:
 , waar F n = K F F t /cosα w
, waar F n = K F F t /cosα w
De gevaarlijke sectie AB bevindt zich in de spanningsconcentratiezone die wordt veroorzaakt door een vormverandering op het overgangsoppervlak aan de basis van de tand. De lokale spanning in deze sectie overschrijdt de nominale met α T keer:
σ F = σ F nom α T, waarbij α T de theoretische spanningsconcentratiefactor is.
Rekening houdend met deze spanning in het gevaarlijke gedeelte

De buigarm h p en de tanddikte S worden uitgedrukt in termen van de modulus m
Waar  - coëfficiënt rekening houdend met de vorm van de tand en de spanningsconcentratie. Geselecteerd uit een tabel of grafiek.
- coëfficiënt rekening houdend met de vorm van de tand en de spanningsconcentratie. Geselecteerd uit een tabel of grafiek.
Gezien de sterkteconditie σ F< [σ] F , получим формулу для verificatieberekening van tandwielen voor buigspanningen:
 ,
,
waarbij Y β de coëfficiënt is die rekening houdt met de hellingshoek van de tand Y β = 1 – β/100, op voorwaarde dat Y β > 0,7; Yε - coëfficiënt rekening houdend met de overlapping van de tanden Y ε = 1/ε α = 1/1,6 = 0,65.
Voor spoor tandwielen : Y β = 1; Y ε = 1 met een nauwkeurigheidsgraad van 8,9;
Y ε \u003d 0,8 met een nauwkeurigheidsgraad van 5, 6, 7. Y FS 1 > Y FS 2 omdat de tandwieltand aan de basis dunner is dan de wieltand. Om een ongeveer gelijke buigsterkte van de bijpassende tanden te garanderen, is het tandwiel gemaakt van een sterker materiaal. De voorwaarde van gelijke buigsterkte van tandwiel- en wieltanden: [σ] F 1 /Y FS 1 ~ [σ] F 2 /Y FS 2
Door F t \u003d 2 10 3 T 1 /d 1 u d 1 \u003d 2a w / (u ± 1) te vervangen, verkrijgen we een formule voor het controleren van de berekening van tanden voor buigspanningen en het oplossen van de resulterende ongelijkheid voor m: 
De breedte b 1 van de tandwielkroon is 2 - 4 mm groter gemaakt dan de breedte b 2 van het wiel om de mogelijke axiale verplaatsing van de tandwielen als gevolg van montageonnauwkeurigheden te compenseren. Dit is belangrijk bij het draaien in tanden, wanneer een hardere versnelling een minder hard wiel in de breedte overlapt.
Door b \u003d b 2 te nemen en K m \u003d 10 3 Y FS Y β Y ε aan te duiden, verkrijgen we de berekende afhankelijkheid voor het bepalen van de minimumwaarde van de tandmodule
M  ,
,
waarbij K m = 3,4 10 3 - voor rechte tandwielen;
K m = 2,8 10 3 - voor schuine tandwielen.
In plaats van [σ] F wordt de kleinste van [σ] F 1 u [σ] F 2 vervangen in de formule.
Kenmerken van de geometrie en bedrijfsomstandigheden van tandwielen
De as van de wormsnijder maakt bij het snijden van de tanden van een cilindrisch tandwiel een hoek β met het eindvlak van het wiel. Daarom zijn in het vlak loodrecht op de richting van de tand alle afmetingen standaard. In een tandwieloverbrenging kan de afstand tussen de tanden worden gemeten in de eind- of omtrekrichting (t - t) en normaal (n - n) richtingen. In het eerste geval wordt de districtstap p t verkregen , in de tweede, de normale stap p. De betrokkenheidsmodules verschillen ook in deze richtingen. :
M T = P T /π , M N = P/ π , waar m t ; m n zijn de wijk- en normale modules.
P t = P/ cosβ, vandaar, M T = M N / cosβ. De normale module moet voldoen aan de norm.
Voor een wiel zonder offset zijn de delen d en initiële d w diameters:
D = D w = M T Z = M N Z/ cosβ
Naast de eindoverlapping bij schuine vertandingen is er ook een axiale overlapping voorzien .
Axiale overlappingscoëfficiënt ε β \u003d b 2 / p x, waarbij p x de axiale stap is, gelijk aan de afstand tussen dezelfde punten van twee aangrenzende tanden, gemeten in de richting van de tandwielas (fig.)
Kenmerken van de geometrie bepalen de verschillen in de bedrijfsomstandigheden van de tandwieloverbrenging.
1. De tand van het aangedreven wiel grijpt aan, beginnend vanaf de bovenkant, waarbij de lengte van de contactlijn eerst groter en kleiner wordt wanneer deze van de kop van de tand naar de steel wordt verplaatst. De tand werkt niet in één keer, het is beter en sneller om in te lopen.
2. De contacttijd van een paar tanden neemt toe, waarbij nieuwe paren tanden aangrijpen; de belasting brengt een groot aantal contactlijnen over, wat ruis en dynamische belastingen aanzienlijk vermindert. Hoe groter de hellingshoek β van de tandlijn, hoe soepeler de aangrijping.
3. De belasting over de lengte van de contactlijn wordt verdeeld in verhouding tot de totale stijfheid van de tandwiel- en wieltanden.
4. In een tandwieloverbrenging nemen 2-3 paar tanden tegelijkertijd deel aan de aangrijping. Daarom is de totale lengte van de contactlijn l Σ vlecht groter (met ongeveer 30%) dan in een rechte lijn l Σ
l Σ cos = b 2 /(Z 2 ε cosβ b) ; l Σ recht = b 2 /Z 2 ε .
Coëfficiënt Z ε houdt rekening met de totale lengte van de rijdraad:
Voor rechte tandwielen Z ε =
waarbij ε α de coëfficiënt van eindoverlapping is.
5. De verhouding tussen de kromtestralen van de contacttanden in spiraalvormig tandwiel gunstiger: Σ(1/ρ i) cos = cosβ b Σ(1/ρ i) recht
Contactspanningen, als andere dingen gelijk blijven, zijn bij schuine vertanding minder waard dan bij rechte vertanding.
Het concept van een gelijkwaardig wiel.
Het profiel van een schuine tand in normale doorsnede n - n valt samen met het profiel van een recht tandwiel. De berekening van schuine tandwielen wordt uitgevoerd met behulp van de parameters van het equivalente rechte tandwiel:
m n - module; Z v - aantal tanden. Het profiel van de tand valt samen met het profiel van een voorwaardelijk tandwiel, genaamd equivalent, deeldiameter d v = m n Z v .
d v = 2ρ v = d/cos 2 β = m t Z/cos 2 β = m n Z/cos 3 β , waarbij ρ v de kromtestraal is.
Uit de gelijkheid m n Z v \u003d m n Z / cos 3 β volgt het equivalente aantal tanden:
Z v = Z/cos 3 β.
Met een toename van de hoek β van de helling van de tandlijn nemen de equivalente parameters toe, wat bijdraagt aan een toename van de sterkte van de transmissie.
Σ(1/ρ i) = 1/ρ 1 ± 1/ρ 2 = (ρ 2 ± ρ 1)/(ρ 2 ρ 1) =
Aanduiden:
Z E =
-
Z H =
Zε =
;
Vervanging in de formule F t \u003d 2 10 3 T 1 /d 1; b 2 \u003d ψ ba a w; d 1 = 2a w /(u ± 1) , zullen we achtereenvolgens verkrijgen
Beslissen voor een w die we krijgen
en w= ;
Ter aanduiding van K a =
een w = K een
, waar F n = K F F t /cosα w
h p = μm en S = λm , waarbij μ en λ coëfficiënten zijn die rekening houden met de vorm van de tand. Dan
Waar -
, waar Y β
M
ONTWERPBEREKENING VAN CILINDRISCHE VERSNELLING
Bij het ontwerpen van een tandwieloverbrenging is het handiger om niet de spanningen te bepalen, maar de belangrijkste geometrische parameters. Centrumafstand:
w = (u + 1)  = , mm
= , mm
waarbij u de overbrengingsverhouding is;
T 2 - koppel op het wiel;
C - coëfficiënt rekening houdend met de mechanische eigenschappen van de bijpassende tandwielen:
310 - voor rechte tandwielen;
335 - voor rechte conische tandwielen;
270 - voor spiraalvormige cilindrische en conische tandwielen;
[σ] H - toegestane contactspanning, afhankelijk van het materiaal en de warmtebehandeling van tandwielen en van de duur van de transmissie
Tandwielen zijn gemaakt van gewalste producten of smeedstukken van hoogwaardig constructiestaal van koolstof of gelegeerd staal met een koolstofgehalte van 0,1 tot 9,6% met verschillende soorten warmtebehandelingen; bij aanzienlijke wielmaten (met een diameter van meer dan 500 mm) wordt gietstaal gebruikt. Voor rechte wielen gemaakt van verbeterd of genormaliseerd staal met een hardheid van niet meer dan HB 350, moet de hardheid van het werkoppervlak van de tandwieltand 20-50 eenheden groter zijn dan de hardheid van de wieltand. Voor niet-rechte tandwielen bereikt het verschil in hardheid van het tandwiel en het wiel 100 eenheden of meer, wat de belastbaarheid van de transmissie in termen van contactsterkte verhoogt.
Met een aanzienlijke maar rustige belasting kan continu harden worden uitgevoerd, met een grote en dynamische belasting moet het binnenste deel van de tand stroperig zijn en de buitenste hoge sterkte, met een kleine dynamische belasting, kan de hele tand stroperig zijn . Als het overgedragen vermogen groot is, moeten wielen met een hogere oppervlaktesterkte worden gebruikt om de massa en afmetingen van de transmissie te verminderen. de tanden moeten massief zijn of oppervlaktegehard, gecarboneerd, gecyanideerd en ... Dergelijke tanden moeten geslepen of gelept zijn, daarom moet de mate van nauwkeurigheid hoog zijn. Wielen met chevrontanden worden niet gehard en er wordt niet geslepen.
Toegestane contactbelastingen voor tandwielen en wielen:
waarbij [σ] P 0 de toelaatbare contactspanning is die overeenkomt met het basisaantal belastingscycli N MAAR (geselecteerd volgens tabel 1)
Z R - coëfficiënt rekening houdend met de ruwheid van de werkoppervlakken van de tanden (bij de 7e ruwheidsklasse -1; bij de 6e ruwheidsklasse - 0,95)
Z V - coëfficiënt rekening houdend met de invloed van omtreksnelheid en hardheid (bepaald volgens de grafiek Z V - V met hardheid HB ≤ 350 en HB > 350)
К НL – duurzaamheidsfactor К Н L = 
waarbij N HO het basisaantal laadcycli is
N HE is het equivalente aantal laadcycli van het wiel
NHE= 
waarbij T i max het maximale continue koppel is
T i - momenten in belastingstappen die overeenkomen met het aantal belastingscycli N i (belastingsveranderingsgrafiek)
N i = 60n i t hi K K(w)
waar n i - rotatiefrequentie van de as onder invloed van het moment T i, min -1;
t hi - duur van de belasting T i , in uren;
K K is het aantal schakelingen van het berekende wiel.
[σ] Н =  =
=
Na de definitie is het noodzakelijk om te controleren of aan de voorwaarde is voldaan:
[σ] N ≤ 1,23[σ] N min
Met een toename in de richting van toenemende betrouwbaarheid voor schuine tandwielen, kan de waarde [σ] H gelijk worden gesteld aan de kleinste van de twee [σ] H1 en [σ] H2
K Hα - coëfficiënt rekening houdend met de ongelijke verdeling van de belasting tussen de tanden; voor rechte wielen 1; voor spiraalvormige tanden volgens het schema;
K Hβ - coëfficiënt rekening houdend met de ongelijke verdeling van de belasting over de lengte van de rijdraad - wordt bepaald uit het schema of uit de tabel;
K HV - dynamische coëfficiënt, rekening houdend met de invloed van transmissienauwkeurigheid, tandhardheid en omtreksnelheid - wordt bepaald uit de tabel;
Ψ va - tandwielbreedtecoëfficiënt
Ψ va = b/a w Ψ bd = b/d
De keuze van waarden ψ ba en ψ bd heeft een aanzienlijke invloed op de kwaliteit van de transmissie - de efficiëntie, afmetingen, vereisten voor productie- en assemblagetechnologie; met een toename van de breedtecoëfficiënt van de tandkrans neemt de belastingsconcentratie toe.In de ontwerpberekening wordt de waarde ψ va gegeven:
0,125 ... 0,20 - voor rechte tandwielen van versnellingsbakken;
0,20 ... 0,35 - voor rechte tandwielen;
0,20 ... 0,50 - voor schuine tandwielen;
0,40 ... 0,80 - voor visgraatversnellingen.
Voor elke volgende fase van de versnellingsbak neemt ψ va toe met 20 - 30% in vergelijking met de vorige.
Standaardwaarden: 0,100; 0,125; 0,160; 0,20; 0,250; 0,315; 0,40; 0,50; 0,630; 0,80; 1.0; 1.25
Na het bepalen van de hartafstand wordt de dichtstbijzijnde standaardwaarde genomen: 40; 50; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200; 225; 250; 280; 315; 355; 400; 450; 500; 560; 630.
Na het aanpassen van de parameters en coëfficiënten een verificatieberekening voor contactduurzaamheid wordt uitgevoerd:
σ Н =  MPa
MPa
Hier, als de contactspanning niet meer dan 5 ... 6% hoger is dan de toegestane, of de onderbelasting niet hoger is dan 10%, wordt de berekening als bevredigend beschouwd.
Contactsterktetest voor kortdurende overbelastingen:
σ H max = σ H  , MPa
, MPa
waarbij [σ] Npr – ultieme spanning voor contactsterkte:
bij Н ≤ НВ 350 [σ] Нpr = 3.1σ Т
Н > НВ 350 [σ] Нpr = 41.3НRC
Buigen duurtest:
σ F =  , MPa
, MPa
waarbij T het koppel op het geteste wiel is, N.m.
Z is het aantal tanden van het geteste wiel;
K F α - belastingsfactor, rekening houdend met de belastingsverdeling tussen de tanden (voor rechte tandwielen K = 1; voor schuine tandwielen met een gemiddelde eindoverlappingscoëfficiënt ε α = 1,5 en 8 graden nauwkeurigheid van de wielen
K Fβ - coëfficiënt rekening houdend met de ongelijke verdeling van de belasting over de breedte van de kroon (tabel)
K FV - coëfficiënt rekening houdend met dynamische belastingen (tabel)
Y F - tandsterktefactor, bepaald door het equivalente aantal tanden
Z V = Z/cos 3 β
β is de hellingshoek van de tand in spiraalvormige (8 0 ... 20 0) en chevron (25 0 ... 40 0) tandwielen;
Y β - coëfficiënt rekening houdend met de helling van de tand, met β< 40 0
Y β = 1 – β/140 0
m - koppelingsmodule (voor spiraalvormige m n - normale module)
m = m n = (0,01 … 0,02)a w
De module van de wieltand moet zo minimaal worden gekozen als de buitendiameters van de werkstukken groeien met de toename, maar niet minder dan 1,5 ... 2 voor krachtoverbrengingen
Bepaal het aantal tanden van de wielen:
Z1 =  Z2 = uZ1
Z2 = uZ1
De minimaal toegestane waarde van Z 1 , zonder het risico van ondersnijden van de tandsteel, voor ongecorrigeerde wielen: Z min ≥ 17cos 3 β
Toegestane spanning tijdens de verificatieberekening voor het uithoudingsvermogen van de tanden bij buiging: [σ] F = [σ] F 0 K FL Y R Y M
waarbij [σ] F 0 de toelaatbare buigspanning is die overeenkomt met het basisaantal cycli van spanningsveranderingen N FO (tabel)
K FL is de duurzaamheidsfactor die afhankelijk is van de verhouding tussen de basis en het equivalente aantal laadcycli
KFL= 
N FO = 4 10 6 - basisaantal cycli
NFE =  - equivalent aantal buigcycli
- equivalent aantal buigcycli
m F - graad, m F = 9 - voor stalen wielen met een niet-gepolijst oppervlak met een hardheid van HB> 350 en voor gietijzeren wielen; m F = 6 - voor wielen met een hardheid van minder dan HB350
Als N FE > N FO = 4 10 6 dan nemen we K FL = 1
Y R - coëfficiënt rekening houdend met de ruwheid van de werkoppervlakken (1 - voor geslepen en gefreesde oppervlakken; 1,05 - carboneren, nitreren; 1,2 - gepolijst met normalisatie of verbetering)
Y M = 1 voor d ≤ 300 is de coëfficiënt rekening houdend met de diameter van de wielen.
Bepaling van de geometrische parameters van cilindrische wielen
Diameter steekcirkel:
2. Breedte van het ringwiel
voor versnelling b 1 = ψ ba a w + 5
voor wiel b 2 = Ψ ba a w
3.Diameter van de toppen van de tanden d a = d + 2m n
4. Diameter van verdiepingen d f = d - 2,5 m n
5. Perifere snelheid V = 
Bij het ontwerpen van een tandwieloverbrenging kan het nodig zijn om het tandprofiel te wijzigen door de parameters van de oorspronkelijke contour te wijzigen (met de inloopmethode). Het gebruik van niet-standaard begincontouren wordt beperkt door de noodzaak om een speciaal snij- en snijwerk te maken meetapparaat. Deze behoefte kan bijvoorbeeld ontstaan bij de vervaardiging van wielen met het aantal tanden. In dit geval kan blijken dat de tandkoppen van het gereedschap in de tandwortels snijden van het wiel dat wordt vervaardigd. Dit fenomeen gaat gepaard met het afsnijden van een deel van de tand in het gebied van de stengel en het verzwakken van het gedeelte waar de grootste spanningen optreden. Dit fenomeen wordt genoemd een tand snijden. Dit gebeurt wanneer een lijn of cirkel van tooltips de aangrijpingslijn kruist bij punt (A) buiten het actieve gebied (punt M) (Figuur 5.11). Om dergelijke wielen met een standaardgereedschap te snijden, wordt de offset van het snijgereedschap ten opzichte van het werkstuk gebruikt. Snijgereedschap zijn zo gepositioneerd ten opzichte van het werkstuk dat het scheidingsvlak van het gereedschap de scheidingscirkel van het snijwiel niet raakt over een bepaalde afstand -x, genaamd verplaatsing originele contour (Figuur 5.13). Bij het vervaardigen van offsetwielen wordt het tandprofiel gewijzigd door een ander ingewikkeld deel van dezelfde basiscirkel te gebruiken. Laten we de vereiste tandheugelverplaatsing bepalen bij het doorslijpen van het wiel met een standaardgereedschap bij . In Fig. 5.13 wordt de pitchlijn van het rek verplaatst ten opzichte van de pitchcirkel van het wiel met de hoeveelheid offset x, wat de eindpositie van het snijpunt van het actieve deel van de aangrijpingslijn (N-N) met de lijn van de tandheugelkoppen (punten M).
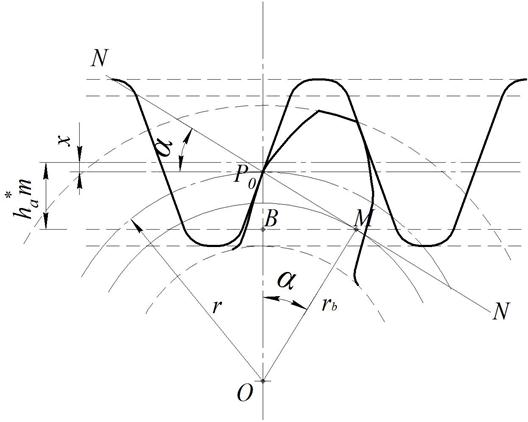
Het segment, zoals te zien is in figuur 5.13, is gelijk aan:
Waar - bias-factor gelijk aan de verhouding van de verplaatsing x tot de koppelingsmodulus m.
Het segment is gelijk aan de straal van de steekcirkel van het snijwiel
Van driehoeken en we hebben:
EN 
 .
.
Verminderen met de waarde van de module van de resulterende expressie, kunt u krijgen
 ,
,
Wat, rekening houdend met (5.20), zal zijn
 (5.21)
(5.21)
Een versnelling die ten minste één wieluitsparing met een offset bevat, wordt genoemd offset transmissie .
Tandheugel offset vanaf de wielas - positieve bias versnelling (), naar de as - overdracht van negatieve vooringenomenheid ( ).
Het gebruik van offset-tandwielen maakt het volgende mogelijk:
Elimineer het ondersnijden van de tandwieltanden bij , waardoor de afmetingen van het tandwiel kunnen worden verkleind.
Voer de versnelling in op de opgegeven hartafstand met behoud van de opgegeven overbrengingsverhouding.
Verhoog de soepelheid van aangrijping, contact en buigsterkte van de tanden, en verminder slip en slijtage.
Een combinatie van verschillende versnellingen kan een overbrenging geven geen verrekening
- (![]() ), equidisplaced
– (),
), equidisplaced
– (),
Met een positieve insteek() En met negatieve offset – ().
De methode voor het bepalen van de afmetingen van tandwielen die met offset zijn gesneden, hangt af van het type aangrijping en de totale verplaatsing. Voor spiraalvormige rechte wielen met externe vertanding met bekende en .
1. Bereken de coëfficiënt van de totale verplaatsing
![]() (5.22)
(5.22)
2. Bepaal de equivalente wisselhoek die overeenkomt met de aangrijpingshoek
 (5.23)
(5.23)
Waar: ![]() ,
, ![]() , - profiel hoek origineel circuit.
, - profiel hoek origineel circuit.
Volgens de tabellen van vreemde valuta bepalen we.
3. Centrumafstand
 (5.24)
(5.24)
4. Diameters van begincirkels:
EN  (5.25)
(5.25)
Waar is de overbrengingsverhouding.
Bij tandwielen met een offset wordt de kleinste afstand tussen de steekcirkels genoemd waargenomen verplaatsing. Het verschil tussen de totale en de waargenomen verplaatsingen is uitbalanceren. De verhouding tussen waargenomen verplaatsing en modulus is − waargenomen biasverhouding
De verhouding van de egalisatieverplaatsing tot de modulus - egalisatie bias factor
5) Diameters van cirkels van toppen en bodems
6) Verdelende omtrektanddikte
 (5.30)
(5.30)
Door deze formules te analyseren, kunnen de volgende kenmerken van verschillende versnellingen worden vastgesteld.
In transmissie zonder vooringenomenheid ( ![]()
centrum afstand
invalshoek.
De omtrekdikte van de tand verdelen.
Hoogte tandkop.
Tand hoogte ![]() .
.
tandwieloverbrenging ![]()
centrum afstand
invalshoek.
Tand hoogte ![]() .
.
In tegenstelling tot de nulversnelling, in dit geval bij dezelfde tandhoogte, zullen de verhoudingen tussen de hoogte van de kop en de steel veranderen
Labo #21
Constructie van ingewikkelde tandwielprofielen door de lopende methode te gebruiken
leerinstrumenten, berekening en ontwerp van tandwielen
Doel van het werk:ontdekken theoretische basis het doorslijpen van ingewikkelde tandwielen met een tandheugel met behulp van de inloopmethode en het effect van tandheugelverplaatsing op de vorm van de wielen die worden doorgesneden, de methode bestuderen voor het berekenen van de belangrijkste parameters van tandwielen, het bestuderen van de methode voor het berekenen en ontwerpen van een tandwiel trainen met behulp van een blokkeercircuit.
Het verkrijgen van ingewikkelde profielen door de lopende methode
De geometrische vorm en afmetingen van de tanden van het snijwiel zijn afhankelijk van de vorm, afmetingen van het gereedschap en zijn positie ten opzichte van het onafgewerkte wiel.
Volgens de inloopmethode worden de tanden van de wielen gesneden (fig. 1) door frezen op tandwielvormmachines, kammen op tandwielsnijmachines en wormsnijders op tandwielsnijmachines.
Inbraak methodeis gebaseerd op de theorie van ingewikkelde tandwieloverbrenging, waarvan de belangrijkste positie dat is het bewegende gereedschap en het werkstuk krijgen relatieve bewegingen, hetzelfde als de bewegingen van de schakels van het overeenkomstige tandwiel.
Een van de voordelen van deze methode is dat het mogelijk is om met hetzelfde gereedschap tandwielen met een willekeurig aantal tanden te snijden verschillende vormen profiel.
Tijdens het inlopen van het onafgewerkte wiel met het gereedschap, rolt de steekcirkel van het snijwiel zonder te verschuiven langs een rechte lijn van de oorspronkelijke contour van het gereedschap evenwijdig aan de steeklijn. .
Figuur 1
scheidingslijn het gereedschap is een rechte lijn waarlangs de dikte van de tand gelijk is aan de breedte van de holte .
De positie van het gereedschap ten opzichte van het werkstuk van de schijf die wordt doorgezaagd, wordt hierdoor bepaald offset ( xm )origineel opwekkingscircuit , waarvoor de kortste afstand tussen de steekcirkel van het snijwiel en de steeklijn van de nominale initiële producerende rail (gereedschap) wordt genomen . Hier X- gereedschapsoffsetfactor - de verhouding van de verplaatsing tot de module van het tandwiel dat wordt gesneden; m - berekend moduul (of gewoon de modulus) van een recht tandwiel gelijk aan de delende normale modulus , waarvoor geaccepteerd lineaire waardeπ keer minder dan de normale steek van de tanden, wat de kortste afstand is tussen dezelfde profielen van aangrenzende tanden, gemeten langs de steekcirkel van het wiel(module-afmeting in mm).
Er kunnen drie soorten tandwielen worden gesneden met behulp van de inloopmethode (afb. 2):
Fig. 2
1) wielen zonder offset ( X =0), verkregen door de steekcirkel van het snijwiel langs de steeklijn van de oorspronkelijke gereedschapscontour te rollen;
2) positieve offset wielen (centrale deel van Fig. 2), verkregen door de steekcirkel langs een rechte lijn te laten lopen evenwijdig aan de steeklijn en op afstand daarvan door een positieve verplaatsing +xm(het gereedschap lijkt weg te bewegen van het midden van het werkstuk x>0);
3) wielen met negatieve offset ( X <0), полученные аналогично, но при отрицательном смещении - xm (het gereedschap lijkt het midden van het werkstuk te naderen).
De kleinste afstand tussen het midden van het werkstuk en de scheidingslijn van de oorspronkelijke contour van het gereedschap wordt beperkt door het ontbreken van het snijden van de tanden van het snijwiel. Bij snoeien een deel van het ingewikkelde profiel aan de basis van de tand van het snijwiel wordt afgesneden als gevolg van tandinterferentie tijdens het inschakelen van de machine(Afb. 3).
Een ander defect van de tand tijdens het inschakelen van de machine, geassocieerd met het fenomeen van interferentie, is het afschuiven van de tand. Tand snijden - Dit het afsnijden van een deel van het nominale oppervlak aan de bovenkant van de tand van het bewerkte wiel als gevolg van tandinterferentie tijdens het inschakelen van de machine.
Afb.3
Minimale offsetfactor x min voor een lat aanvankelijke contour, die ervoor zorgt dat de tand niet wordt ondersneden, wordt bepaald door de formule:
![]()
Waar X minis de coëfficiënt van de kleinste verplaatsing van de begincontour;H A * - coëfficiënt van de hoogte van de tandkop van de initiële contour van het gereedschap;z min- het kleinste aantal tanden vrij van ondersnijding;z - het aantal tanden van het snijwiel
![]()
Waar - de hoek van het tandheugelprofiel.
De maximale verplaatsing van de oorspronkelijke contour van het gereedschap is beperkt slijpen van de toppen van de tanden gesneden wiel. Er wordt geloofd dat verscherping vindt plaats als (fig.3), voor zwaarbelaste tandwielen - .
De belangrijkste elementen van de uitrusting
Versnelling- een mechanisme met drie schakels waarin twee bewegende schakels tandwielen zijn die een rotatie- of translatiepaar vormen met een vaste schakel.
Afb.4
De belangrijkste parameters die kenmerkend zijn voor de tandwieltrein (Fig. 4) zijn onder meer: hartlijn, hartafstandA w , verlovingspaal, verlovingslijn, verlovingshoek, boog van betrokkenheid.
middellijnО 1 О 2 - een rechte lijn die de assen van de transmissietandwielen in een rechte hoek snijdt.
centrum afstand aw- de afstand tussen de assen van de tandwielen van de transmissie langs de hartlijn.
Verlovingslijn N 1 N 2 - traject van het gemeenschappelijke contactpunt van de tanden wanneer het beweegt ten opzichte van de vaste schakel tandwiel trein, die bij lineair contact wordt bepaald in het hoofdgedeelte. G- de lengte van de aangrijpingslijn.
Pool van betrokkenheid versnelling - het contactpunt van de beginvlakken van de versnellingen van de transmissie. Gedefinieerd als het snijpunt van de hartlijn en de aangrijpingslijn.
Actieve inzetlijn B 1 B 2 - deel van de tandwielaangrijpingslijn dat overeenkomt met de actieve actieve tandlijn of, in het geval van lineair contact, de actieve profielen van samenwerkende tanden in het hoofdgedeelte van het tandwiel, G A - de lengte van de actieve aangrijpingslijn.
De lengte van het voorpoolgedeelte van de actieve aangrijpingslijn gf - de lengte van het deel van de actieve aangrijpingslijn, overeenkomend met de hoek van de voorpooloverlapping van het tandwiel van het ingewikkelde tandwiel.
De lengte van het polaire deel van de actieve aangrijpingslijn g een - de lengte van het deel van de actieve aangrijpingslijn, overeenkomend met de hoek van de polaire overlapping van het tandwiel van het ingewikkelde tandwiel.
N 1 , N 2 , B 1 , B 2 - limietpunten van de aangrijpingslijnen en het actieve deel ervan. Het grenspunt van de aangrijpingslijn is elk van de punten die de aangrijpingslijn van de tandwieltrein begrenzen en correspondeert met de grenspunten van het werkelijke theoretische tandoppervlak, dat, in lineair contact, het snijpunt is van de aangrijpingslijn met de grenslijn van het aangrijpingsoppervlak.
Invalshoek – een scherpe hoek in het hoofdgedeelte van een ingewikkeld tandwiel tussen de aangrijpingslijn en een rechte lijn loodrecht op de hartlijn.
Het werkprofiel van de tand is het profiel van de tand aan de werkzijde. . De werkzijde van de tand is het laterale oppervlak van de tand dat betrokken is bij de overdracht van beweging. Maar niet alle ingewikkelde is betrokken bij de verloving, d.w.z. theoretisch werkprofiel, maar slechts een deel ervan, dat het actieve profiel wordt genoemd. Actief tandprofiel- dit deel van het tandprofiel dat overeenkomt met het actieve oppervlak. actief oppervlak- een deel van het zijoppervlak van de tand, waarlangs de interactie met het zijoppervlak van de gepaarde tandwieltand plaatsvindt(d.w.z. verloofd met hem) . mn, ef - de werkelijke werkprofielen van de tanden, waar m , v – toppunten van het actieve profiel. Het bovenste punt van het actieve profiel is het punt van het actieve profiel dat zich het dichtst bij de bovenkant bevindt. n, e zijn de laagste punten van het actieve profiel. Het onderste punt van het actieve profiel is het punt van het actieve profiel dat het dichtst bij de overgangscurve ligt.
Boog betrokkenheid CD wordt de afstand genoemd tussen het werkprofiel van de tand van één wiel, die aangrijpt in t.B 1 en verlaat in t.B 2, gemeten langs de boog van een cirkel. De verlovingsboog kan langs elke cirkel worden gemarkeerd: begin, scheiding, hoofd.
De aanvankelijke cirkel verdeelt de tanden in het aanvankelijke hoofd en het aanvankelijke been.
Hoogte van de eerste kop van de tand hwa - de afstand tussen de omtrek van de toppen van de tanden en de steekcirkel van het rechte tandwiel. Hoogte van het eerste been van de wieltand hwf - de afstand tussen de steekcirkel en de omtrek van de troggen van het rechte tandwiel. Hoogte van de tand van het wiel H- de afstand tussen de cirkels van de toppen en bodems van het rechte tandwiel .
radiale speling Met de afstand genoemd tussen de omtrek van de toppen van het ene wiel en de omtrek van de troggen van het andere wiel :
waar m - moduul in mm;is de coëfficiënt van radiale speling.
Waargenomen vooringenomenheidjm- het verschil tussen de hartafstand van een recht tandwiel met offset en de hartafstand ervan
![]()
Waar A w O – middenafstand verdelen, gelijk aan de helft van de som van de steekdiameters van de tandwielen met externe tandwieloverbrenging en het halve verschil met interne tandwieloverbrenging; j- coëfficiënt van waargenomen verplaatsing, gelijk aan de verhouding van de waargenomen verplaatsing tot de berekende module van het rechte tandwiel.
Met andere woorden, waargenomen vooringenomenheid- dit is de afstand tussen de steekcirkels van de wielen, gemeten langs de middellijn.
overlappingspercentagehoudt rekening met de continuïteit en soepelheid van de versnelling. Overlappingsratio wordt uitgedrukt door de verhouding van de lengte van de verbindingsboog ( Tb, Tw, T) langs een willekeurige cirkel (hoofd-, begin- of deelcirkel) naar stap ( pb, pw, P) langs dezelfde cirkel.
![]()
Als de inschakelboog kleiner is dan de spoed (), dan zal de aangrijping intermitterend zijn, met herhaalde stoten op het moment dat het volgende paar tanden in aangrijping komt. Met een aangrijpingsboog gelijk aan de spoed () de betrokkenheid kan alleen theoretisch als continu worden beschouwd. Een normaal werkende transmissie moet hebben. Voor aangrijping met rechte tanden En theoretische grensis de waarde
Een korte inleiding tot offset-tandwielen
Offset tandwieltanden worden gemaakt op dezelfde machines en met hetzelfde standaardgereedschap als niet-offset tandwieltanden.
Het verschil ligt in het feit dat bij de vervaardiging van tandwielen met een offset, het gereedschap met enige offset in radiale richting wordt geïnstalleerd (Fig. 2 en Fig. 3). Dienovereenkomstig worden de wielblanks met offset gemaakt met een gewijzigde diameter.
De gereedschapscorrectie wordt bepaald door de formule:
Waar – verplaatsingscoëfficiënt;M- de module van het geproduceerde tandwiel.
Afbeelding 3 toont tanden gemaakt met hetzelfde gereedschap maar met verschillende offsetverhoudingen. Uit de figuur blijkt dat hoe groter de waarde van de verplaatsingscoëfficiënt, hoe verder het tandprofiel van de hoofdcirkel verwijderd is. Tegelijkertijd neemt de kromming van het ingewikkelde profiel af en wordt de tand dikker aan de basis en scherper aan de bovenkant.
Bijhet wiel verandert in een rail en de tand krijgt een rechtlijnige omtrek. Afnemend z de dikte van de tand aan de basis en bovenkant neemt af, en de kromming van het ingewikkelde profiel neemt ook toe. Als het aantal tanden z een bepaalde grenswaarde bereikt zmin , dan worden bij het snijden van tanden met een tandheugelgereedschap de pootjes van de tanden bijgesneden. Als gevolg hiervan wordt de buigsterkte van de tand aanzienlijk verminderd. Het minimaal toegestane aantal tanden wordt ingesteld langs de trimgrens. Bij het zagen van rechte tanden met ingewikkelde aangrijping met een standaard tandheugelgereedschap, het minimaal toegestane aantal tanden, bepaald door formule (2), zmin=17.
Zoals hierboven vermeld, elimineer het ondersnijden van de tanden wanneer z< zminmogelijk door de positieve verplaatsing bij het snijden van tandwielen.
Er moet ook aan worden herinnerd dat bij een groot aantal tanden de verplaatsing niet effectief is, aangezien de vorm van de tand in dit geval bijna niet verandert (voor de tandheugelen de verplaatsing verandert de vorm van de tand helemaal niet).
Gereedschapsoffset bij het snijden van cilindrische tandwielen wordt ook gebruikt om het tandwiel in de gespecificeerde hartafstand te passen.
Circuits blokkeren
Een ondoordachte keuze van de numerieke waarden van de verplaatsingscoëfficiënten bij het ontwerpen van een tandwieloverbrenging kan leiden tot de volgende defecten in de vertanding en vertanding.
1. Tand interferentie- een fenomeen dat bestaat uit het feit dat bij het beschouwen van het theoretische beeld van tandwielaangrijping een deel van de ruimte gelijktijdig wordt ingenomen door twee op elkaar inwerkende tanden.
2. Verlagen van de overlappingscoëfficiënt en overschrijden van de grenswaarde. Aanbevolen voor rechte tandwielen, voor spiraalvormig.
3. Om de tanden te scherpen en de grenswaarde te overschrijden S a =0, waarbij S a - de dikte van de tanden langs de omtrek van de uitsteeksels. De kleinste maximaal toegestane tanddikte langs de omtrek van de wieluitsteeksels voor zwaarbelaste tandwielen: met oppervlakteverharding van de tanden is 0,4M; voor wielen met een homogene structuur van het tandmateriaal - 0,3M(Afb.5).
4. Snijtanden (fig. 5).
Afb.5
Bij het ontwerpen van een tandwieloverbrenging die bestaat uit wielen met een aantal tanden z 1 en z 2 en module Mtandwielontwerp wordt gereduceerd tot de keuze van verplaatsingscoëfficiënten x 1 en x 2 versnellingen.
Het is het gemakkelijkst om de beperkingen die aan x 1 en x 2 worden opgelegd in een coördinatensysteem te beschouwen, waarbij de waarden van de offsetcoëfficiënt x 1 worden uitgezet langs de abscis-as en langs de ordinaat-as x 2 (Fig. 6). De grenswaarden van elk van de bovenstaande 4 factoren in dit coördinatensysteem komen overeen met een bepaalde lijn die de zone met aanvaardbare waarden x 1 en x 2 scheidt van de zone met onaanvaardbare waarden.
Lijnen van de blokkeercontour (zie afb. 6):
1 - overlappingsverhoudingslijn blok);
2 - overlappingsverhoudingslijn(paarse lijn in de figuur verkregen bij het werken met het programma blok);
Afb.6. blokkerende schakeling
3 - de diktelijn van de tandwieltand (tandwiel wordt het tandwiel genoemd, dat een kleiner aantal tanden heeft) langs de omtrek van de uitsteeksels(groene lijnen in de figuur verkregen bij het werken met het programma blok);
4 - de diktelijn van de tandwieltand langs de omtrek van de uitsteeksels;
5 - de grens van interferentie op de wortel van de tand van het wiel (gele lijnen in de figuur verkregen bij het werken met het programma blok);
6 - de interferentiegrens op het been van de tandwieltand (gele lijnen in de figuur verkregen bij het werken met het programma blok);
7 - regels van de minimale waarde van de verplaatsingscoëfficiënt x 1 bij de vervaardiging van tandwielen vanuit de toestand van afwezigheid van ondersnijding van de tanden (rode lijn in de figuur verkregen bij het werken met het programma blok);
8 - regels van de minimale waarde van de verplaatsingscoëfficiënt x 2 bij de fabricage van het wiel vanuit de toestand van afwezigheid van ondersnijding van de tanden (rode lijn in de figuur verkregen bij het werken met het programma blok);
9 - isolijn van een gegeven hartafstand A w (blauwe lijn in de figuur verkregen bij het werken met het programma blok ); met een interaxale afstand gelijk aan de deling A wO, gaat contour 9 door de oorsprong van het coördinatenstelsel.
Dus, blokkerende schakeling vertegenwoordigt het gebied van toelaatbare waarden van de verplaatsingscoëfficiënten x 1 en x 2, waaronder gunstige omstandigheden voor het schakelen van de wielen worden geboden: geen ondersnijding en interferentie, zorgen voor de vereiste overlapverhouding, geen verscherping, enz.
De zone binnen de contour gemarkeerd in Fig. 6 door arcering bepaalt het bereik van toegestane waarden x 1 en x 2 en is een blokkerende contour.
Apparatuur
TMM-42 apparaat voor het tekenen van ingewikkelde profielen door in te lopen, papieren cirkel ("blanco") gemaakt van whatman-papier, tekenpotlood, kompassen, schaalliniaal, calqueerpapier (A4-formaat), programma's " Spurgear" en "Blo met k".
Om het effect van gereedschapsverplaatsing op de vorm van het tandprofiel te bestuderen en om de omstandigheden te identificeren die ervoor zorgen dat er niet wordt gesneden, werken we aan het TMM-42-apparaat, dat de inloopmethode simuleert. Het algemene aanzicht van het apparaat wordt getoond in Fig.7.
Afb.7
Op de basis 1 van het apparaat zijn een schijf 2 en een rail 3 geïnstalleerd, waarmee een gereedschap wordt nagebootst voor het maken van een tandwiel. De schijf bestaat uit twee delen: het bovenste deel 2, gemaakt van organisch glas en een cirkel voorstellend met een diameter gelijk aan de diameter van de wielblanco, en het onderste deel 4 - een cirkel met een diameter gelijk aan de diameter van de scheidingswand cirkel. Beide cirkels zijn stevig met elkaar verbonden en kunnen draaien om een as die aan de basis van het apparaat is bevestigd. De rail zit vast met schroeven 5. Aan de zijkanten van de rail zitten twee schalen 6 en 7, en op de rail staan twee risico's (rechts en links), die dienen om de offset af te lezenxm(mm).
Als de oorspronkelijke contour van het gereedschap zich zo bevindt dat de scheidslijn m-m raakt de steekcirkel van het werkstuk, dan zullen we op de laatste de profielen van de tanden van het wiel verkrijgen zonder verplaatsing. De markeringen op rail 3 zullen samenvallen met de nulmarkeringen van de schalen 6 en 7.
Bij het verschuiven van de oorspronkelijke contour van het gereedschap ten opzichte van de rechte lijn m-m u kunt wieltandprofielen krijgen met positieve of negatieve offset. De beweging van de rail wordt geteld op schaal 6 en 7, waarna deze wordt vastgezet met schroeven 5.
De intermitterende translatiebeweging van de rail wordt uitgevoerd door toets 8. Wanneer toets 8 wordt ingedrukt met de werkende pal van het ratelmechanisme, beweegt rail 3 naar links (in de richting van de pijl) met 4-5 mm.
Naast de sleutel 8 bevindt zich de L-vormige handgreep 9 van de vrijloop van de wagen. In de juiste positie (de handgreep ligt op de drukpen) is de normale werking van de sleutel 8 verzekerd (d.w.z. de stapsgewijze translatiebeweging van de tandheugel); wanneer de hendel tegen de klok in wordt gedraaid, beweegt de slede met de rail vrij met de hand naar rechts en links.
De beweging van de rail 3 en de rotatie van de schijf 2 worden gecoördineerd met een gestrekte snaar. Om de schijf in een bepaalde positie te draaien, moet de snaar worden losgemaakt. Om dit te doen, moet de hendel 10 van het apparaat tegen de klok in worden gedraaid. Om de snaar te spannen wordt de handgreep 10 in de stand van de bovenste aanslag geplaatst.
Werkorder
De leraar geeft aan de leerling het nummer van de tandwielen aan (zie tabel) waarvoor het nodig is om de tandwielen te tekenen en de tandwielen te berekenen en te ontwerpen.
Gegevensblad voor Lab #3
|
versnellingsbak |
Aantal tandwieltanden |
Versnellingsmodules mm |
A w, mm |
|||
|
Nr. van het apparaat voor het verkrijgen van tandprofielen |
z2 |
Apparaatnummer voor ontvangen tand profielen |
||||
|
10 * |
||||||
De tabel * geeft de gewenste transmissieopties aan.
I fase. Het tekenen van ingewikkelde tandprofielen zonder gereedschapsverplaatsing volgens de lopende (afrondings)methode.
1. Maak kennis met het apparaat TMM - 42 en de werking ervan, probeer het mechanisme voor het verplaatsen van het rek uit.
2. Noteer in het laboratoriumwerkrapport het apparaatnummer (het apparaat wordt geselecteerd volgens de tabel, afhankelijk van het versnellingsnummer) en de opgegeven waarden: module (M), railprofielhoek (), tandkophoogtefactor (), steekcirkeldiameter ( D).
3. Bereken wielparameters zonder offset:
aantal wieltanden z = d/m;
diameter basiscirkel
pitch cirkel stap
basis cirkel stap
tanddikte op de steekcirkel
tanddikte langs de hoofdomtrek![]()
Waar ![]() .
.
4. Nadat u de schroef 12 hebt losgedraaid, verwijdert u het deksel 11 en verwijdert u daarachter de papieren cirkel die het blanco wiel imiteert.
Teken op het werkstuk een scheidings- en hoofdcirkel met een kompas (het midden van het werkstuk wordt gemarkeerd door een punctie van een dunne naald). Installeer het werkstuk op zijn oorspronkelijke plaats.
Monteer de rail zo dat de risico's op de rail tegen de nulverdelingen van de weegschaal liggen.
5. Plaats de papieren cirkel op drie naalden van schijf 2 en druk deze aan met deksel 2, eerder losgeschroefd met schroef 12.
6. Door de hendel 9 tegen de klok in te draaien, maakt u de rail los van het ratelmechanisme en verplaatst u deze naar de uiterst rechtse positie. Zorg vervolgens voor de werkende staat van de rail door dezelfde hendel 9 naar de aanslagpen te draaien.
7. Teken een contour van de profielen van de tandheugel met een potlood op een papieren cirkel.
8. Door op toets 8 te drukken de tandheugel een stap naar links verplaatsen en de omtrek van de tanden van de tandheugel opnieuw volgen. Dit wordt gedaan totdat de rail zo ver mogelijk naar links reikt en op een papieren cirkel krijg je 2-3 goed getekende wieltanden.
II. fase. Berekening en ontwerp van tandwieloverbrenging.
1. Bepaal met formule (1) de door de leraar opgegeven hartafstand van het tandwielstel.
Keuze uit R a 40 normale lineaire afmetingen numerieke waarde van de initiële hartafstand A w, En A w>eenwOen zit er het dichtst bij.
2. Het programma gebruiken ” Spurgear ” bepaal voor een bepaalde module welke paren tanden van de wielen z1 en z2 mogelijk met geselecteerde initiële hartafstand A w.
Zorg ervoor dat de wielen met de opgegeven z1 en z2 zijn onder hen te vinden. Verander anders de hartafstand. Als het niet mogelijk is om de initiële hartafstand te selecteren, ga dan naar stap 3 en neem de waarde A w van tafel 3.
3. Voor een gegeven A w, m , z 1 en z 2 met behulp van het programma " blok » bouw een blokkeerschakeling en bepaal de verplaatsingscoëfficiënten x 1 en x 2 .
Als het aantal tanden z1 en z2 gelijk zijn, dan moeten de offsetcoëfficiënten x 1 en x 2 ook gelijk zijn.
Selecteer x 1 en x 2 met behulp van de verkregen blokkeercontour.
4. Teken ingewikkelde tandprofielen met de geselecteerde positieve verplaatsing op het TMM-42 trainingsapparaat, dat het nummer heeft dat wordt aangegeven in de gegevenstabel.
5. Nadat u de schroeven 5 hebt losgedraaid, verplaatst u de rail weg van de as van het werkstuk met de berekende verplaatsing x 1 meter (mm), die is ingesteld op schaal 6 en 7. Bevestig vervolgens de rail weer met schroeven 5.
6. Door de hendel 10 naar links te draaien totdat deze stopt, maakt u de schijf met de papieren cirkel los en draait u deze ongeveer 120 0 ten opzichte van de vaste rail. Daarna wordt de hendel 10 opnieuw overgebracht naar de juiste positie, waarbij de algemene beweging van de schijf 2 en het rek 3 wordt gekoppeld.
7. Volgens de methode gespecificeerd in paragrafen 7 - 8 (Ie fase), teken drie tanden van het wiel met een positieve offset.
8. Als het aantal tandwieltanden anders is z1 en z2 , dan worden items 5 - 7 ook uitgevoerd voor het tweede wiel.
9. Gebruik een kompas om op de afbeelding van de tandwielen de cirkel van de toppen van het wiel te tekenen met een positieve offset. Meet de dikte van de tand langs de omtrek van de hoekpuntenen vergelijk de verkregen waarden met de berekende.
10. Teken een tandwieloverbrenging op een overtrekpapier met potlood of een vel A4-papier op een schaal van 1: 1 (Fig. 1).
11. Teken een middellijn.
12. Leg op de middellijn de hartafstand O 1 O 2 (a w), waar O 1 - het midden van de versnelling; O 2 is het middelpunt van het wiel.
13. Teken vanuit het midden van O 1 de cirkels van de troggen en hoekpunten van het tandwiel (r f 1 , ra 1 ).
14. Teken vanuit het midden van O 2 de cirkels van de troggen en toppen van het wiel (r f 2 , ra 2 ).
15. Vanuit de centra O 1 en O 2 uitvoeren basis cirkels wielen ( r in1 , r in2 ).
16. Teken een interne raaklijn aan de hoofdcirkels en markeer de contactpunten erop N 1 en N 2 , die de aangrijpingslijn definieert met de lengte Q .
17. Markeer op de middellijn de paal van de P.
18. Plaats het werkstuk onder het calqueerpapier, lijn het midden uit met het midden O 1. Draai het werkstuk rond dit middelpunt zodat een van de tandprofielen met Z1 viel samen met de paal P. In dit geval is het noodzakelijk om ervoor te zorgen dat de aangrijpingslijn loodrecht staat op het profiel van de tand. In deze positie wordt de tandwieltand met een potlood op calqueerpapier gekopieerd.
19. Lijn het midden van het onafgewerkte wiel uit met het midden O 2, breng het profiel van de wieltand mee Z2 zodat deze in de tandwieltand grijpt. Wieltanden met Z2 ook gekopieerd met potlood op calqueerpapier.
20. Markeer de snijpunten B 1 en B 2 van de aangrijpingslijn met de cirkels van de toppen van de wielen. Lijn B 1 B 2 zal de actieve aangrijpingslijn met een lengte zijn qa. Markeer lengte q f subpolair deel en lengteq eenpolaironderdeel van de actieve lijn van betrokkenheid.
21. Markeer de aangrijpingshoek α w.
22. Teken vanuit de middelpunten O 1 en O 2 bogen met stralen O 1 V 1 en O 2 V 2, waarbij de werkelijke werkprofielen van de tanden worden bepaaldmn En bijv.
23. Teken vanuit de middelpunten O 1 en O 2 de begincirkels (rw 1 , rw 2 ) van beide wielen. Markeringhwa 1 , hwf 1 - de hoogte van de initiële kop en het voetstuk van de wieltand zonder verplaatsing;hwa 2 , hwf 2 - de hoogte van de initiële kop en de tandwortel van de wielen met een positieve offset.
24. Markeer de radiale speling C.
25. Construeer een boog van betrokkenheid CD : met het begin (punt B 1) en het einde (punt B 2) van de aangrijping wordt een van de tandprofielen van het wiel met een positieve offset gecombineerd en gekopieerd op het calqueerpapier. Markeer snijpunten met en D dit profiel met de basiscirkel. Boog CD zal de boog van betrokkenheid zijn langs de basiscirkel.
26. Bereken en voer in het rapport en op de tandwieltekening de overlappingscoëfficiënt in:
![]()
waar B 1 B 2 - de lengte van de actieve aangrijpingslijn;P V - tandsteek langs de hoofdcirkel.
1. Leg alle resultaten van de werkzaamheden vast in het laboratoriumwerkrapport. Bevestig het getekende diagram van de tandwieloverbrenging en blanco's op tekenpapier aan het rapport.
Controle vragen
1. Wat is een betrokkenheidsmodule?
2. Wat is een genererend broncircuit?
3. Wat worden cirkels genoemd: verdelen, hoofd, pieken, dalen, initiaal?
4. Wat is het fenomeen van ondersnijdende tanden en wat zijn de criteria voor ondersnijden?
5. Wat is het fenomeen van het slijpen van tanden en wat zijn de criteria voor het slijpen?
6. Wat wordt de verplaatsingscoëfficiënt en de verplaatsing van het oorspronkelijke genererende circuit genoemd?
7. Wat is de coëfficiënt van de minste vertekening?
8. Wat is een ingewikkelde?
9. Noem de eigenschappen van de ingewikkelde.
10. Toon voor elk punt van de ingewikkelde de kromtestraal en de huidige straalvector.
11. Geef voor elk punt van de ingewikkelde de profielhoek en de ingewikkelde hoek weer.
12. Wat is de verlovingspaal, verlovingslijn, verlovingshoek?
13. Wat is een actieve betrokkenheidslijn?
14. Toon de radiale speling in de figuur van de tandwieloverbrenging, waar is deze gelijk aan.
15. toegepaste mechanica Machine onderdelen Structurele mechanica